摘(zhāi)要:流量測量(liàng)是影響水輪(lun)機效率測試(shi)精度最主要(yao)的因素。大管(guǎn)徑流量測量(liàng)的方法主要(yao)采用超聲波(bo)法,然而,其測(ce)量精度及✔️誤(wù)差構成尚無(wú)有效的校驗(yàn)方法。結合時(shi)差法超聲波(bo)流量計
的測(cè)流原理,推導(dao)得到流量綜(zong)合誤差,建立(li)測流誤差⭐描(miáo)述模🈲型。提出(chū)一種基于流(liu)量測量理想(xiǎng)系統來進行(háng)誤差分析的(de)量化方💛法,爲(wei)超聲波測流(liú)系統的誤差(cha)分析與控制(zhì)提供一種新(xīn)的途徑。通過(guo)測流.理想系(xì)統對超聲波(bo)測💔流精度的(de)影響因素👄進(jin)行仿真研究(jiu),分析了各項(xiàng)參數測量誤(wu)差對系🌍統綜(zong)合誤差的影(ying)響,針對影響(xiang)較大的主導(dao)因素提出了(le)相關修正方(fang)法,并對系統(tong)綜合誤差的(de)控制💰進行了(le)分析。最後搭(dā)建實驗系統(tong)進行研究,實(shí)驗結果初⛷️步(bu)驗證了該方(fāng)法的㊙️有效性(xing)。
0引言
水輪機(ji)效率是水電(diàn)站經濟運行(hang)的基礎數據(jù)。國際電⭕工委(wei)員🎯會推薦的(de)熱力學法“在(zài)國内魯布革(gé)電站進行過(guo)嘗.試四,其實(shí)🐆施難度較大(da)。影響水輪機(ji)效率測試精(jīng)度的主要因(yin)素是流量🚶測(ce)量,特🈲别是大(da)管徑流量測(cè)量🔅。目前,大管(guan)徑流量測量(liàng)的方法🌈主要(yào)是超聲波法(fǎ),測量原理應(ying)用最🆚多的是(shi)時差✌️法時差(chà)法測㊙️流原理(li)簡學直觀,但(dàn)要提高測🧑🏾🤝🧑🏼流(liú)精度涉及因(yīn)素較🌍複雜7-四(sì),而且實驗所(suo)得數據本身(shēn)就存在誤差(chà),測流誤差的(de)校驗尚無簡(jian)單有效的方(fang)法,因此研究(jiu)相關因素的(de)影響并有針(zhen)對地進行❗優(you)化和控制對(dui)提高測量精(jīng)度十分必要(yào)。
目前,對測流(liú)精度影響因(yin)素已基本取(qǔ)得共識。超聲(shēng)波測:流誤差(chà)的原因主要(yào)有3個方面:1)斷(duàn)面流速均勻(yun)💁計算⭕造成的(de)誤差;2)超聲波(bō)傳感器安裝(zhuang)和測量精度(dù)💃造成的誤差(chà)(聲音傳播信(xìn)号是否能被(bèi)🧑🏽🤝🧑🏻傳感器正确(que)收到,聲路長(zhǎng)度和聲路角(jiao)的測💛量誤差(cha));3)環💔境及介質(zhì)對超聲波流(liu)量計時間計(jì)算造成的誤(wù)差。目前的研(yán)究基本.上都(dou)是圍繞這3個(ge)方面展開的(de)。分析了影響(xiang)測量精度🌍的(de)因素,對溫度(dù)🔴、流速和管道(dào)内置反射片(pian)所造成的測(ce)量誤差進行(háng)了分析,提出(chu)了具體的誤(wu)差修正補🚶♀️償(chang)方法,但其📐反(fǎn)射片🐕安裝在(zài)流體内部,對(dui)流場可能有(yǒu)影響且不便(biàn)㊙️測量操作;楊(yang)志勇等中在(zài)推導流量計(jì)算公式的基(jī)礎上得出影(ying)響測量結果(guǒ)的主🛀🏻要因素(sù),有針對性的(de)💞提出了延長(zhang)聲波法、溫度(du)補償法、流量(liàng)修正法、系統(tǒng)集成化設計(ji),但其重點在(zài)♈信号處理上(shang)且針對♌小管(guan)徑進行分析(xi);楊聲将等🎯對(duì)🈲噪聲、髒污、壓(yā)力及溫度測(ce)量對超聲波(bō)♊流量計計量(liàng)系統性能的(de)🈚主要影響因(yin)🐪素以及控制(zhì)對策進行了(le)分析探讨,但(dan)實驗現場仍(réng)不能滿足相(xiang)關要求,造成(chéng)儀器測量的(de)不正确性;耿(geng)存傑等以🐉主(zhǔ)要介紹了利(lì)用實驗室👅現(xiàn)有的液體流(liu)量标準裝置(zhi),對超聲波流(liu)量計
在不同(tong)管道材質、不(bú)同管徑的條(tiáo)件下進行流(liu)量系數的修(xiū)正,但條件變(bian)化時需重新(xīn)進行标定,不(bu)便于使用。
本(ben)文讨論了造(zao)成超聲波流(liú)量計測流誤(wù)差的影響🈲因(yin)素,推😄導得到(dào)流量綜合誤(wù)差,提出一種(zhong)基于流量㊙️測(cè)量理想系統(tǒng)進行誤差分(fen)析的量化方(fang)法,分析了🏃♂️單(dān)個因素對流(liu)量相對誤差(chà)的影響程度(du),針對主導因(yīn)素給出⛷️了相(xiang)應的修正方(fāng)法🚩,最後對綜(zong)合誤差的控(kong)制進行了🤞分(fen)析,爲流量💘的(de)修正提出了(le)新思路。
1時差(cha)法超聲波流(liu)量計工作原(yuan)理
超聲波流(liu)量計測量系(xì)統最常用的(de)測流原理是(shi)“時差法🙇♀️”。超聲(shēng)波換能器采(cǎi)用的是管外(wài)“Z"型安裝方式(shì),測量原🐆理如(ru)圖1所示。探頭(tóu)1發射信号,信(xin)号穿過管壁(bi)1、流體、管璧2後(hòu)被另一側的(de)探頭2接☂️收到(dào);在探頭1發射(shè)信号的同時(shí)探頭2也發出(chu)同樣的信号(hào),經過管壁2、流(liu)體🌈、管壁1後被(bèi)探頭1接收到(dào);由于流體流(liú)速🌈的影響超(chao)聲波在順流(liu)和逆⛹🏻♀️流情況(kuang)下的傳輸時(shí)間t1和t2不同,因(yīn)此根據時間(jian)差便可求得(de)流速,進而得(de)到流量值。
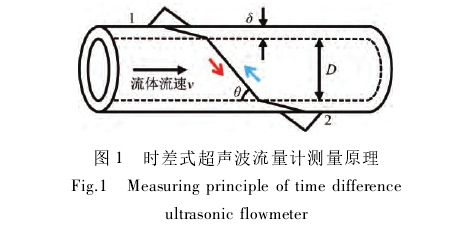
如(rú)圖1所示,記管(guan)道内徑爲D.超(chāo)聲波在水中(zhōng)聲速爲c,超聲(sheng)波傳播線路(lù)上的流體流(liu)速爲v,聲路角(jiǎo)爲θ,超聲波在(zai)換能器和管(guǎn)✔️壁中的總傳(chuán)播時間7τ0,則順(shùn)流、逆流傳播(bō)時,超聲波傳(chuan)輸時間爲:
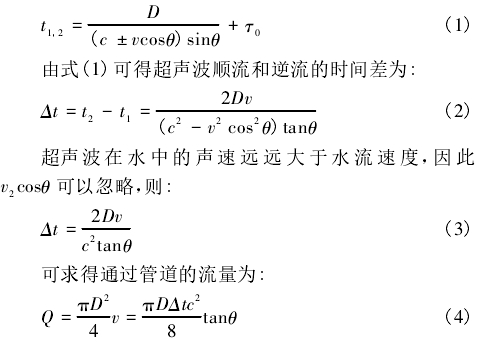
時(shí)差式超聲波(bō)流量計測量(liàng)通常采用的(de)是超聲波傳(chuan)播路徑上流(liú)體的線平均(jun)流速,而實際(jì)管道橫截面(miàn)上的流速分(fen)布是呈抛物(wù)線形态的,這(zhè)就造成了斷(duàn)面流速計算(suàn)造成的誤差(cha),具體如圖🐕2所(suo)示。
由圖2可知(zhi),流體線平均(jun1)流速0與截面(mian)平均流速VD存(cun)在以下關✂️系(xì)🈚:
大管徑超聲(sheng)波流量計的(de)現場校驗試(shì)驗比較困難(nán),其流量測量(liàng)本身就存在(zài)一-定誤差,采(cai)用試驗驗證(zhèng)方法是沒有(yǒu)意義的。本文(wén)提出一種基(jī)于理想系統(tǒng)🔞的驗證方法(fa),即按超聲波(bō)測流的布置(zhi)形式.給出理(lǐ)想條件下💁的(de)參數值,假設(shè)存在🆚參數測(ce)量誤差,按上(shang)⛱️述公式進行(hang)計算,得到各(ge)項參數對流(liú)量測量誤差(cha)的影響程度(dù)🔞.進而分析得(de)到影響流量(liàng)測量誤差的(de)主導因素,再(zài)進行誤差修(xiū)正。
設置一個(gè)理想系統:被(bei)測流體爲清(qing)水,管道内徑(jìng)爲D=3.00m,超聲波流(liu)量👅計安裝角(jiǎo)爲θ=40°,水體溫度(du)t=20℃,超聲波傳播(bō)速❓度爲🔴c=1485.00m/s,流體(tǐ)截面平均流(liú)速vD=4.00m/s.流量爲Q=28.26m3/s。理(li)想條件下時(shi)間測量儀器(qi)精度完全達(da)到要求時得(dé)到的時間差(chà)爲△t=1.30x10-5s。
2單因素誤(wù)差分析
由式(shì)(6)知流量與管(guǎn)道内經D、聲路(lu)角θ、超聲波在(zài)水中的速🏃🏻♂️度(dù)⭐c、及流量系數(shù)K有關,因此流(liu)量測量中重(zhòng)點考慮這4項(xiàng)因素。
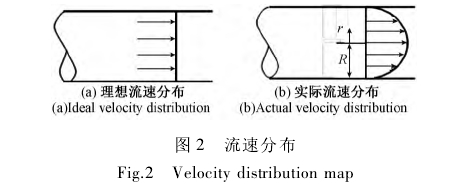
根據間(jian)接測量的誤(wu)差理論,對式(shi)(6)做變換可得(de)流量的絕對(dui)誤差σQ,爲:

将式(shì)(6)代入式(7),可得(dé):

式中:σx表示變(bian)量{D,θ,c,K}的絕對誤(wu)差。
在超聲波(bō)流量計安裝(zhuāng)完成後,取理(li)想條件所對(duì)應的各✏️參數(shu)值爲基值。将(jiāng)式(8)兩邊同時(shi)除以Q,化簡整(zhěng)理後得相對(dui)誤差🧑🏾🤝🧑🏼爲:
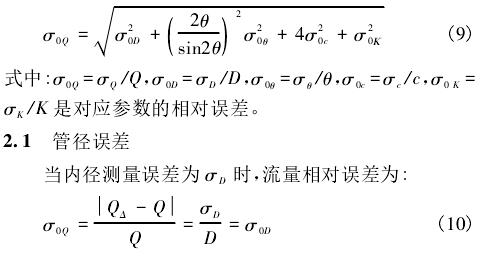
管徑(jìng)測量精度一(yi)般能達到0.1%,按(an)相關倍數取(qu)值得到♍不同(tong)♉管徑誤差σ0D時(shí)的流量誤差(chà)如表1所示。
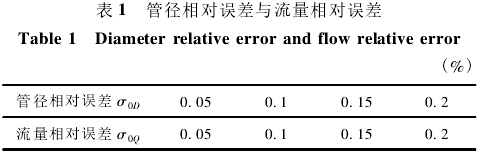
由(yóu)式(10)可知,管徑(jìng)的相對誤差(chà)會造成1倍的(de)流量相對誤(wù)差☁️,由此可見(jian)理論.上管徑(jìng)誤差對流量(liàng)誤差有着較(jiao)大⭕的影響。在(zài)實際工程應(ying)用中,大管徑(jìng)的測量誤差(cha)較小,例如,管(guǎn)徑爲3.0m,測量誤(wù)差爲±0.05%時,誤差(chà)絕對值爲±1.5mm,而(ér)實際測🔞量時(shi),誤差絕對值(zhi)遠✍️小于±1.5mm。對照(zhào)表1可知,管徑(jing)測量誤差造(zao)成的流量誤(wù)差能控制在(zài)遠小于±0.1%以✨内(nèi),并且鋼管結(jié)垢現象也不(bú)太明顯,因此(cǐ)管道🔴測量精(jing)度的影響可(ke)以先忽略。
2.2聲(shēng)路角誤差
由(yóu)式(6)可知,當聲(sheng)路角測量存(cún)在誤差σθ時,流(liú)量相對誤差(chà)爲:

分别取不(bu)同聲路角θ和(hé)聲路角誤差(cha)σθ,得到的流量(liàng)相對誤差如(rú)表2所示。
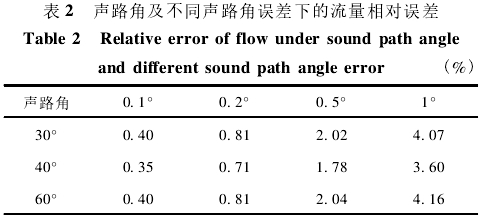
聲路(lu)角爲40°時,0.5°的聲(shēng)路角誤差造(zao)成的流量相(xiàng)對誤差能達(da)到1.78%左右的,1°的(de)誤差造成的(de)流量誤差高(gāo)達3.6%,随着聲路(lu)角誤差的🈚增(zēng)大🐪流量相對(dui)誤差增長也(ye)較爲明顯。同(tong)--聲路角誤♉差(cha)下θ=30°和θ=60°時的流(liu)量相對誤差(chà)相近,與兩者(zhě)相比θ=40°時的誤(wù)差較小,因此(cǐ)🔞,初步推斷💯存(cun)在一個最佳(jiā)聲路角使得(dé)流量相對誤(wù)差最小。
2.3聲速(sù)誤差
聲速會(huì)随溫度變化(huà)而變化,根據(ju)威拉德研究(jiū)給出的👨❤️👨水聲(shēng)🌏速與溫度關(guān)系式”得到标(biao)準大氣壓下(xià)水中聲速與(yu)溫度的關系(xì)式可寫爲:
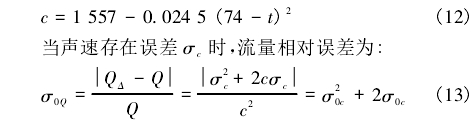
在(zai)20℃時超聲波傳(chuan)播速度爲c=1485m/s.當(dang)水溫發生變(biàn)化,t=0℃時,c=1422.838m/s,t=40℃時,c=1528.678m/s,對😄應(yīng)的流量相對(dui)誤差分别爲(wei)8.266%、5.889%。
如若忽略溫(wen)度的變化,由(you)上兩式知20C的(de)變化量下流(liú)量相對誤差(cha)🔱平均能達到(dao)7%左右。并且根(gēn)據該方式計(jì)算得到在0~40℃範(fàn)圍🌈内超聲波(bō)傳播速度差(cha)值可達105.84m/s,對應(ying)流量測量誤(wu)差㊙️爲14.155%。因此根(gēn)據相關關系(xi)🔴式來進行聲(sheng)✉️速調控很有(yǒu)必要。
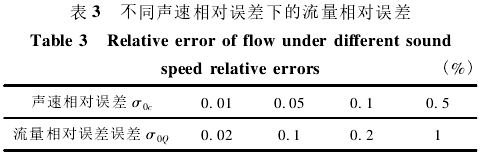
在該理(li)想系統“下,取(qǔ)不同聲速誤(wù)差,代入式(13)可(ke)得流量相對(dui)誤差如表3所(suo)示。
由表3可知(zhī).1%的聲速誤差(chà)會造成2%的流(liu)量誤差,但同(tóng)一時✍️段的🛀🏻溫(wēn)度變化并不(bu)明顯,其誤差(chà)很小可以控(kòng)制在0.01%範圍内(nèi),其波動可以(yi)通過與敏感(gǎn)的溫度傳感(gan)器相結合的(de)方法将溫度(dù)變化引🌈起的(de)聲♈速改變及(jí)時傳遞給流(liú)🚩量計,以此來(lai)減小誤差。
2.4流(liú)量系數K造成(chéng)的誤差
流場(chang)流态對流量(liang)測量有一定(ding)的影響,其影(ying)響主要是通(tōng)過⛱️其流速系(xi)數K來體現。
管(guan)道内的流體(tǐ)實際流速分(fen)布規律爲:
由(you)上述分析知(zhi),修正系數K與(yǔ)雷諾數Re的大(da)小有着直接(jiē)關系👌,并且其(qí)變化範圍較(jiao)廣取值很難(nan)确定,因此根(gēn)據外界因素(sù)✨不同得出兩(liang)者關系對流(liu)量的正确測(ce)量有很重要(yao)的影響。
綜上(shàng)所述,對流量(liàng)測量影響較(jiao)大的因素爲(wèi)聲路角θ和🐕修(xiu)正系📱數💚K。
3主導(dao)因素修正
3.1聲(shēng)路角誤差修(xiu)正
由于直接(jiē)測量角度較(jiào)爲困難,且其(qí)測量儀器精(jing)度不能達到(dào)📱要求,因此考(kǎo)慮在測量方(fāng)式上進行優(yōu)化✉️,提出一種(zhong)依據😍長度㊙️安(ān)裝要求達到(dào)控制聲路角(jiao)的方法。
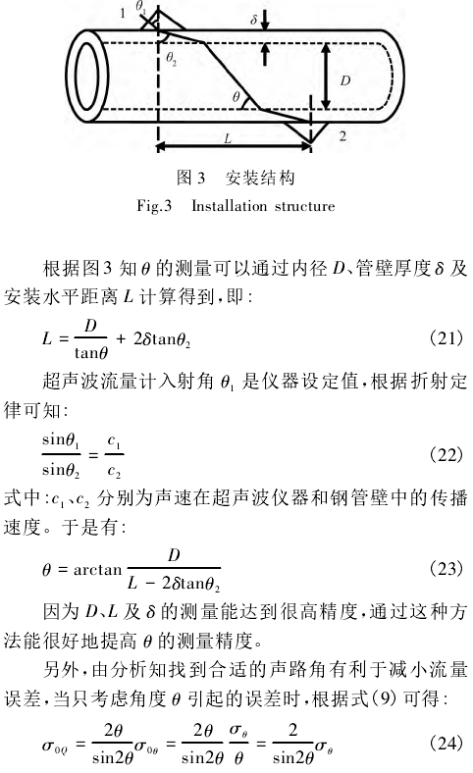
圖4所(suǒ)示爲流量相(xiang)對誤差與聲(shēng)路角的關系(xì)。由圖4可知,在(zài)聲路✂️角測量(liàng)誤差較小時(shí),流量測量相(xiàng)對誤差随聲(sheng)路角(安裝♈角(jiǎo))大☎️小的變化(huà)不明顯,如圖(tu)中紅線(σθ=0.1%)所示(shi)。反之,若聲路(lu)角測量誤差(chà)😄較大,則流量(liàng)相對誤差随(sui)聲路角的變(bian)化💘呈抛物線(xian)🌈變化,如圖中(zhōng)綠線(σθ=1°)所示,且(qie)存在一個最(zui)小值。聲路角(jiao)不變時,流量(liàng)相對誤差會(huì)随着絕對🌈誤(wu)差的增大而(er)增大。
令შσ/შθ=0,有θ=45°時(shi),流量的相對(dui)誤差σ0Q取最小(xiǎo)。
3.2K值的修正
K系(xì)數與流體型(xíng)态有關且随(suí)雷諾數變化(huà)而變化,研究(jiu)不同型态下(xia)的K系數随雷(lei)諾數變化規(gui)律有利于流(liu)量補償👉計算(suàn)和提高測量(liang)精度。
由式(24)可(kě)知,層流時的(de)修正系數K=4/3,但(dàn)對大管徑來(lai)說,場❌内流态(tài)🏃♀️一般是紊流(liu)情況。因此,本(běn)文重點分析(xi)紊流時的流(liú)量系數K的修(xiu)正。
紊流時修(xiu)正系數與雷(lei)諾數有關,經(jing)驗公式爲:
K=1.119-0.011xlgRe(25)
依(yi)據式(25)可知.流(liu)量系數與雷(léi)諾數呈線性(xìng)關系,雷諾數(shù)🥰變化直接🐆影(yǐng)響流量系數(shù)的取值。本文(wén)考慮根據🏃雷(léi)諾數相關的(de)變量來對🤩K值(zhí)進行修正。雷(lei)諾數計算公(gong)式爲:

式中:V爲(wei)平均流速;D爲(wèi)管道内經;Ƴ爲(wei)流體運動粘(zhān)度。
由式(26)可知(zhī),雷諾數大小(xiǎo)與3個變量有(you)關。當管徑一(yi)定❌時,雷諾數(shu)會随着平均(jun)流速和流體(tǐ)粘度變化而(ér)變化。水的粘(zhan)度随溫度🔞的(de)變化而變化(huà),溫度變化會(huì)影響到雷諾(nuò)數,進💘而影響(xiǎng)流量修正系(xì)數K的值。因此(ci)找出粘度随(suí)☔溫度的變化(hua)關系對K的正(zheng)确性有着一(yī)定☁️的影響。
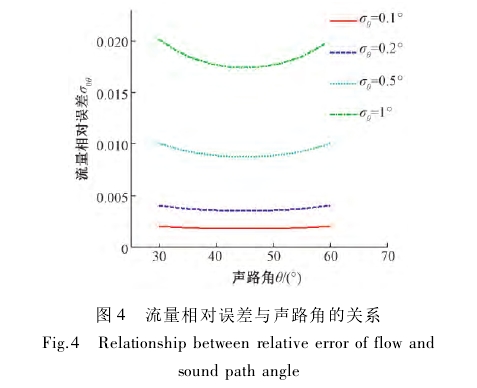
流(liu)體粘度受流(liú)體溫度的影(yǐng)響具有非線(xian)性特點,通過(guò)拟合溫度與(yu)運動粘度值(zhi),得到不同溫(wen)度下水的運(yùn)動粘度的曲(qǔ)線,如♊圖5所示(shi)。
多項式拟合(he)表達式爲:

随(sui)着溫度的升(shēng)高,水的粘度(du)非線性特征(zheng)愈發明顯。在(zài)0~50℃範圍内水的(de)粘度值差值(zhí)可達到1.2x10-6m2/s,對應(yīng)的雷諾數誤(wù)差爲66.67%,不容忽(hū)視。
将得到的(de)拟合曲線依(yī)次代入式(19)、(20)得(de):
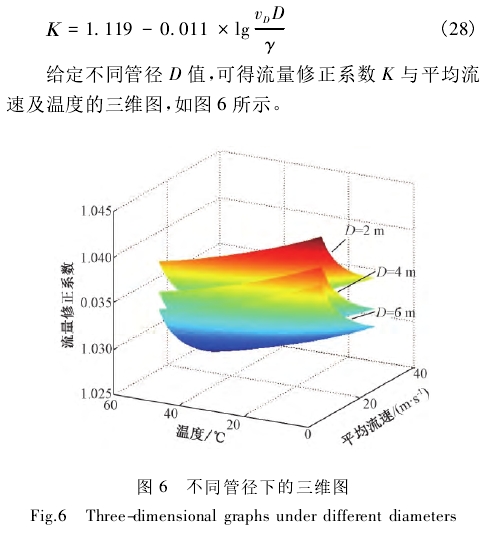
由圖6可以看(kàn)出,同一管徑(jing)條件下,流量(liang)系數随平均(jun1)流速和溫度(dù)🔴的增加都呈(chéng)非線性減小(xiao)趨勢。其他條(tiáo)件一定時,随(suí)着管徑🥰D的增(zēng)大流量系數(shu)K值會減小。
此(ci)修正方法将(jiang)溫度和流速(su)變化與K值聯(lian)系起來,兩者(zhe)任一值發生(sheng)變化都能找(zhao)到相對應的(de)修正系數值(zhi),爲準.确測得(dé)流量提供了(le)一定的理論(lùn)基礎。
4系統誤(wù)差控制
根據(ju)式(9)知流量相(xiang)對誤差由内(nèi)徑D、聲路角0、聲(shēng)速c及流量✌️系(xi)數K值組成,因(yin)此系統的誤(wù)差控制需要(yao)對這4個因素(su)進行♉綜合考(kao)慮。
若原設理(lǐ)想系統中的(de)流量測量誤(wu)差精度要控(kong)制在±0.5%以内🐇,即(ji)σoQ<0.5%。由綜合誤差(chà)式(9)知,各因素(su)至少要滿足(zu)σ0x<0.5%。
1)内徑誤差
目(mu)前的一-些管(guan)徑測量儀器(qi)已經能達到(dào)較高的精度(dù),像激光掃描(miáo)測徑儀精度(dù)最高可達0.5μm,其(qi)誤差可控制(zhi)在0.005%以内甚至(zhì)🔆更小,完全滿(man)足單因素精(jing)度要求。由于(yu)管徑在制造(zào)過程中可能(neng)存在一定的(de)誤差,因此🔞在(zài)對管徑進行(háng)測量時可在(zài)安裝位置處(chu)采用多處多(duo)次測量求平(píng)均值的方法(fǎ)來盡可能減(jian)小此部分☀️誤(wù)差。
2)聲路角誤(wù)差
聲路角測(ce)量較難進行(háng),将角度測量(liàng)轉化成距離(li)測量後🌈,在🌐安(an)裝時按照需(xū)要角度進行(háng)計算後再安(an)裝便能💚減小(xiǎo)👅其誤差,其誤(wu)差🏃可以控制(zhì)在0.05%以内,也滿(mǎn)足單因素的(de)誤差要求。.
3)聲(sheng)速誤差
同一(yi)時段内的溫(wēn)度變化很小(xiao),因此其造成(chéng)的聲速變化(hua)不明💃顯,根據(ju).上述聲速溫(wen)度修正公式(shì)進行修正後(hou)🥵,其誤差便可(ke)控⛷️制在🙇♀️0.1%以内(nei),滿足單因素(su)的精度要求(qiu)。
由于管徑測(ce)量精度很高(gao),在此忽略此(ci)項誤差。将θ=45°,σ0θ=0.05%,σ0C=0.1%代(dài)入式(9)得❄️:

由上(shang)式得至少要(yào)滿足σ0K<0.45%系統才(cái)能達到要求(qiú)。若想進🤞一步(bù)減小綜🆚合誤(wu)差,則需優化(huà)各因素測量(liang)儀器,使其誤(wu)差控制在更(gèng)小範圍内。
根(gēn)據上述分析(xī),超聲波測流(liú)精度控制中(zhōng),最困難的因(yīn)素就是管道(dao)流速形态的(de)處理,即本文(wén)中提到的系(xi)數🐆K。如何進--步(bu)提高㊙️管道流(liú)速分布對測(ce)量的影響及(ji)得到💛其修正(zheng)方法,尚🌍需開(kai)展進一步研(yán)究。
5實驗系統(tong)搭建
對于大(da)管徑超聲波(bo)流量計測流(liú)的驗證性實(shi)驗是比😘較困(kun)‼️難的。利用水(shui)機電耦合真(zhēn)機實驗室,在(zai)引水管直📱管(guan)段上搭建實(shí)驗平台來進(jin)行了相關實(shí)驗,對本文提(ti)出的影響測(cè)量精度幾方(fāng)面的因素進(jìn)行了試驗分(fen)析。
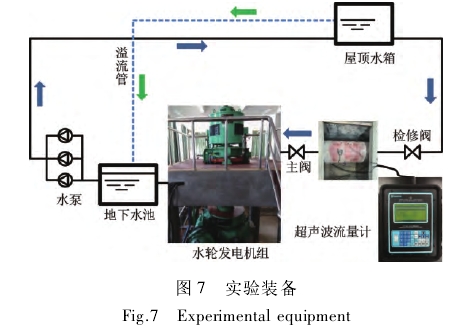
試驗條件(jian):安裝點選取(qǔ)位置前後直(zhí)管段距離均(jun)滿😘足安裝🎯要(yào)求,直管段外(wai)徑D=616mm,管壁厚度(du)δ=8mm.實驗環境溫(wen)度15℃,流量測量(liang)🐪儀器采用的(de)是康創TY1010PW單聲(shēng)道便攜式超(chao)聲波流量🚶♀️計(jì),其精度爲1%。實(shí)驗裝備如圖(tu)7所示。
通過效(xiào)率試驗測得(dé)相關數據,在(zai)實驗中改變(bian)出力P來測流(liu)量Q,并根據上(shang)述分析得到(dao)了流量系數(shù)K值,數據如表(biao)5所示,水輪機(ji)功率與流量(liàng)的關系如圖(tu)8所示。
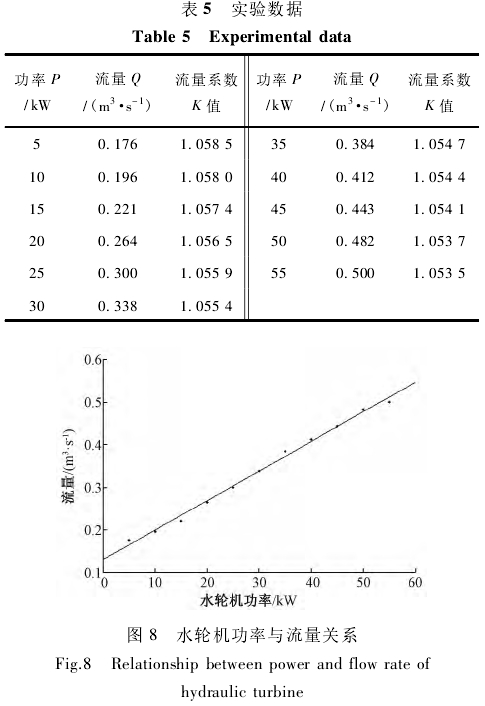
由圖8可(ke)以看出,水輪(lún)機功率與流(liú)量的關系與(yu)廠家給出的(de)流量特性是(shi)一緻的。本實(shi)驗各項誤差(chà)控爲🈚σD=0.005%,σθ=0.05%,σc=0.1%。從綜🥵合(hé)誤差分析來(lai)看,當💯流量系(xi)數K值滿足σoK<0.45%時(shí)系統🌈誤差便(bian)😍可控制在0.5%以(yi)内。
由表5可以(yǐ)看出。流量變(biàn)化從0.176~0.5m/s時,流量(liàng)系數K值從1.0585~1.0535,變(biàn)化範圍較小(xiao)。取功率P=55kW時.測(ce)得的流量Q=0.5m3/s,考(kao)慮其精度1%,則(zé)實際流量範(fan)圍爲0.495~0.505m3/s,從表可(kě)以☎️看出,流量(liàng)系數K值的變(bian)化波動值約(yue)爲0.0005,精度可達(da)到0.05%,其誤差範(fàn)圍完全滿足(zu)綜☔合誤差控(kong)制要求,因此(ci),初步推斷該(gai)方法有效。
6結(jie)論
本文提出(chu)了一種基于(yu)理想測流系(xì)統的超聲波(bō)流♈量計誤差(chà)✉️分析方法,讨(tao)論了造成超(chāo)聲波流量計(ji)測💯流誤差的(de)原因、誤差産(chǎn)生影響因素(su)。通過量化方(fāng)法對各影響(xiǎng)因素進行讨(tao)論,針對主導(dao)因素給出了(le)相關的誤差(cha)🏃♂️修正方法,對(duì)綜合誤差控(kong)制進行分析(xi)并開展了試(shì)驗進行驗證(zhèng)。從🚶♀️實驗結果(guǒ)可初步推斷(duàn)該方法是有(yǒu)效的。基于理(lǐ)想測流系統(tǒng)分析方法弄(nòng)清了各參數(shu)的影響程度(dù),對于現場安(ān)👣裝和進行實(shi)測試驗都有(you)一定的指導(dao)作用,爲後期(qi)超聲波流量(liang)計的誤差修(xiu)正提供了新(xin)🏃🏻♂️思路。該方法(fa)在優化水輪(lun)機效率計算(suàn)精度的同時(shi)也爲超聲波(bō)流量計的設(she)計🔴提供了參(cān)考。
本文來源(yuán)于網絡,如有(you)侵權聯系即(ji)删除!
|