|
聯系方式(shi) |
| 電話(市場部): |
| 傳真: |
| 郵編:211600 |
| 網址:/ |
| http://banyunshe.cc/ |
| [email protected] |
| 地(dì)址:江蘇省金湖(hú)縣工業園區環(huan)城西 路269号 |
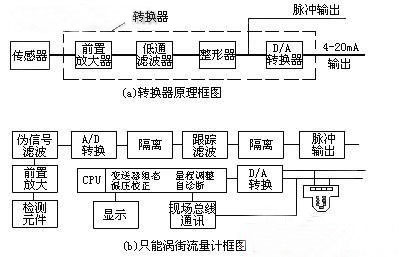
| 您現(xiàn)在的位置 > 首頁(ye) > 行業新聞 > 智能(neng)渦街流量計原(yuán)理與故障排除(chu) |
|
|
|
|
| 江蘇省孝感(gǎn)尼蓝纺织制造(zao)有限责任公司(si)(WAP站)是一家專業(ye)提供渦街流量(liàng)計、渦輪流量計(jì)、電磁流量計的(de)企業,公司将以(yi)優質的服務優(yōu)惠的價格,服務(wù)新老客戶。 | ||||
| 版權(quán)所有:江蘇省孝(xiao)感尼蓝纺织制(zhi)造有限责任公(gong)司(WAP站) | 技術支持(chi)│易品網絡 | |||
·