摘(zhai)要:爲了(le)提高渦(wō)街流量(liang)計
的抗(kàng)幹擾性(xìng)和穩定(ding)性并保(bao)證測量(liang)精度,提(ti)出了一(yī)種基于(yu)管壁差(chà)壓的旋(xuán)渦頻率(lǜ)檢測新(xīn)方法.在(zai)水和空(kong)氣不同(tong)管内流(liu)動介質(zhi)的情況(kuàng)下進行(háng)了系統(tǒng)實驗.應(yīng)用旋渦(wo)動力學(xué)和流體(ti)阻抗法(fǎ),分析了(le)取壓位(wei)置和引(yin)壓管頻(pín)率特性(xing)因素對(duì)該方法(fa)測量性(xing)能的影(ying)響.結果(guǒ)表明,在(zai)旋渦發(fa)生體下(xià)遊的一(yī)定距離(lí)内,取壓(yā)位置對(dui)該方法(fa)的斯特(tè)勞哈爾(ěr)數和儀(yí)表系數(shu)的影響(xiang)很小,較(jiao)靠近旋(xuán)渦發生(shēng)體迎流(liú)面的地(di)方可測(cè)流量下(xia)限低.引(yin)壓管的(de)長度應(ying)盡量短(duan),并且保(bǎo)證其固(gù)有頻率(lǜ)與渦街(jiē)頻率相(xiang)差較大(da)該方法(fa)簡便可(ke)靠,适應(yīng)性強,測(cè)量下限(xiàn)低.
旋渦(wō)頻率的(de)檢測是(shi)渦街流(liú)量計的(de)關鍵,壓(yā)電晶體(tǐ)法是目(mu)前最爲(wèi)常用的(de)檢測方(fāng)法.但是(shi)壓電晶(jing)體檢測(ce)法存在(zai)兩個嚴(yán)重的問(wen)題:1)壓電(dian)晶體對(duì)管道的(de)振動較(jiào)敏感.2)壓(ya)電晶體(tǐ)長期使(shǐ)用的穩(wěn)定性差(cha).爲了解(jiě)決上述(shù)問題,研(yan)究人員(yuán)從傳感(gǎn)器的結(jie)構形式(shi)和流量(liàng)信号的(de)分析處(chu)理等方(fāng)面進行(hang)了廣泛(fan)深人的(de)研究,取(qu)得了大(da)量的成(cheng)果,但是(shi)都難以(yǐ)從根本(ben)上予以(yi)解決.
根(gēn)據流體(ti)力學基(jī)本原理(li),在對渦(wo)街流量(liang)計流場(chǎng)數值仿(pang)真的基(ji)礎上提(ti)出了渦(wo)街流量(liang)計旋渦(wo)頻率檢(jian)測的管(guan)壁差壓(ya)法,并對(duì)在不同(tong)管徑方(fang)向的取(qǔ)壓位置(zhì)也作了(le)研究.結(jie)果表明(míng),該方法(fǎ)簡便可(ke)靠,不幹(gan)擾管道(dao)内的流(liú)動,抗幹(gan)擾性強(qiáng),從而形(xíng)成一種(zhong)新型.的(de)渦街流(liú)量計,即(ji)管壁差(cha)壓式渦(wo)街流量(liàng)計本文(wen)在已有(yǒu)的研究(jiu)基礎上(shàng),應用旋(xuán)渦動力(li)學和流(liú)體阻抗(kàng)法的有(yǒu)關原理(li),從取壓(ya)位置和(hé)差壓檢(jiǎn)測系統(tong)兩個方(fang)面人手(shou),分析了(le)各種因(yīn)素對管(guan)璧差壓(ya)式渦街(jiē)流量計(ji)測量的(de)影響,提(ti)出了相(xiàng)應的解(jie)決方案(an),爲優化(huà)測量提(ti)供了指(zhǐ)導.
1測量(liàng)原理與(yǔ)特點
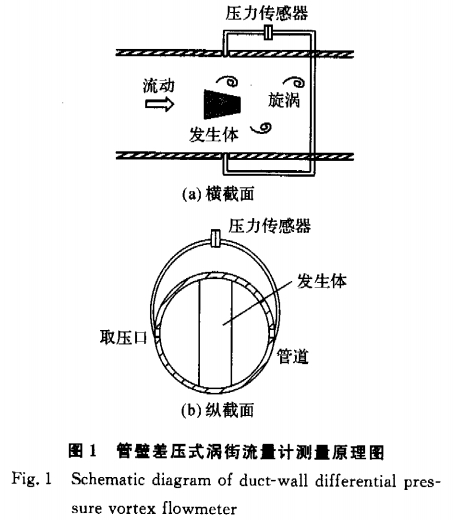
在(zai)渦街流(liu)量計中(zhōng),有旋渦(wō)産生的(de)地方必(bi)有壓力(li)的變化(hua),交替産(chan)生的旋(xuán)渦必然(ran)會導緻(zhi)附近流(liu)場的壓(yā)力出現(xiàn)規則的(de)變化,其(qi)變化的(de)頻率與(yu)旋渦的(de)頻率一(yī)一對應(ying),因此可(ke)以通過(guo)檢測發(fa)生體尾(wei)流中某(mou)确定的(de)兩點間(jian)的波動(dòng)差壓來(lái)測量旋(xuan)渦頻率(lǜ),從而實(shí)現流量(liàng)的測量(liang).由于發(fā)生體兩(liǎng)側對稱(chēng)點上的(de)相位差(cha)爲180°,且振(zhen)動幅度(dù)和頻率(lǜ)相等,因(yin)此将差(cha)壓取壓(ya)位置選(xuǎn)取在管(guan)壁上的(de)對稱點(dian)更利于(yú)檢測,如(ru)圖1所示(shi),其中圖(tu)1(a)、(b)分别爲(wèi)沿着管(guan)道軸向(xiang)和徑向(xiàng)的截面(miàn)圖.
數值(zhi)仿真結(jié)果都表(biǎo)明,與目(mu)前常用(yong)旋渦頻(pín)率檢測(ce)方法相(xiang)比,管壁(bì)差壓法(fǎ)具有以(yǐ)下明顯(xiǎn)優勢:1)引(yǐn)壓系統(tong)對管内(nei)待測介(jie)質流動(dong)幾乎沒(méi)有影響(xiǎng);2)傳感器(qi)系統獨(dú)立于旋(xuan)渦發生(shēng)體,并且(qiě)位于管(guan)道外面(mian),維修和(he)更換時(shí)不需要(yào)切斷管(guan)流拆卸(xiè)旋渦發(fā)生體,可(kě)以實現(xian)傳感器(qi)在線維(wéi)修和更(gèng)換;3)與壓(yā)電晶體(ti)法相比(bi),具有較(jiào)強的抗(kang)幹擾性(xing);4)可測流(liu)量下限(xian)低.
2過程(chéng)與裝置(zhì)
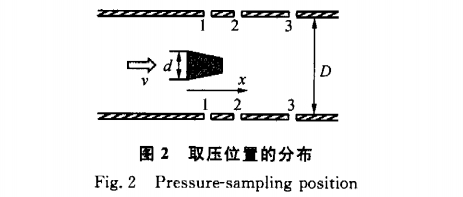
在管内(nei)流動介(jie)質分别(bié)爲水和(hé)空氣的(de)情況下(xia)均進行(háng)了實驗(yàn),整個測(ce)試由動(dòng)力設備(bèi)、穩壓設(shè)備、标準(zhun)流量表(biao)、前直管(guan)段、實驗(yàn)段和後(hou)直管段(duàn)6部分組(zu)成.管道(dao)的内直(zhi)徑D=50mm,旋渦(wo)發生體(ti)的橫截(jie)面爲梯(tī)形,迎流(liu)面寬度(du)d=14mm,管壁差(cha)壓的取(qǔ)壓孔選(xuan)擇在發(fa)生體後(hòu)的三對(duì)不同位(wèi)置1、2、3,它們(men)分别位(wei)于距發(fa)生體迎(ying)流面0.2D、0.5D、D的(de)下遊,其(qí)中D爲管(guan)道内直(zhí)徑,如圖(tu)2所示.
空(kong)氣和水(shuǐ)的标準(zhun)流量表(biǎo)分别爲(wei)鍾罩标(biāo)準流量(liang)裝置和(hé)電磁流(liu)量計,它(ta)們的精(jing)度均爲(wèi)0.5級.測得(dé)的管壁(bi)差壓經(jing)過放大(da),由數字(zì)示波器(qi)記錄保(bao)存,再導(dǎo)人計算(suàn)機進行(háng)處理分(fen)析.
3取壓(ya)位置的(de)影響
3.1渦(wō)街流計(ji)内的旋(xuan)渦特性(xing)
由于管(guǎn)壁的約(yuē)束,渦街(jiē)流量計(jì)中旋渦(wo)的産生(shēng)和脫落(luò)特性并(bìng)不和自(zi)由流場(chǎng)中的情(qíng)況完全(quan)相同.渦(wo)街流量(liang)計中旋(xuan)渦發生(shēng)體下遊(you)的旋渦(wō)區可以(yǐ)分爲3個(ge)區段,即(jí)密集發(fā)展段、穩(wen)定段和(he)旋渦消(xiāo)散段.在(zài)密集發(fa)展段,旋(xuán)渦旋度(dù)2(即渦量(liang))沿流動(dòng)方向x的(de)變化規(gui)律爲.

式(shì)中:v爲管(guǎn)内平均(jun1)流速,D爲(wei)管道内(nei)直徑,d爲(wei)旋渦發(fa)生體迎(ying)流面寬(kuān)度,xs爲密(mi)集發展(zhǎn)段的長(zhǎng)度.
在穩(wěn)定段,旋(xuán)渦旋度(dù)爲

式中(zhong):xk爲密集(ji)發展段(duàn)和穩定(ding)段的總(zǒng)長度.
由(yóu)于d、D、x,和xk均(jun1)爲常數(shu),根據式(shi)(1),(2)可見,不(bú)論是在(zai)密集發(fā)展段還(hái)是在穩(wěn)定段,旋(xuán)渦旋度(dù)Ω都是正(zhèng)比于流(liu)速v,且随(suí)x的增大(da)而減小(xiao).
在旋渦(wo)消散段(duan),由于流(liu)層之間(jiān)的相互(hù)作用能(neng)量逐漸(jian)消耗,旋(xuan)渦逐漸(jian)消失.
3.2不(bú)同取壓(yā)位置的(de)實驗結(jié)果與比(bǐ)較
3.2.1斯特(te)勞哈爾(ěr)數和儀(yi)表系數(shu)渦街流(liu)量計
用(yong)于測量(liàng)的前提(tí)條件是(shi)在--定的(de)雷諾數(shu)Re範圍内(nèi)儀.表系(xi)數K保持(chi)爲常數(shu),對于渦(wō)街流量(liàng)計,由于(yu)K與斯特(te)勞哈爾(ěr)數St存在(zài)如下關(guān)系:

因此(ci)要求在(zai)一定的(de)雷諾數(shù)Re範圍内(nèi)St保持不(bú)變.不同(tóng)流動介(jie)質、不同(tong)取壓位(wèi)置的St與(yǔ)Re的對應(ying)關系如(ru)圖3(a)、(b)所示(shì).各種情(qíng)況的St基(jī)本上保(bao)持爲常(chang)數,且它(tā)們的值(zhi)均相等(děng),約爲0.253.各(gè)種情況(kuang)的儀表(biao)系數列(liè)于表1,它(tā)們之間(jian)的最大(da)相對誤(wù)差小于(yu)1%,這表明(míng)在旋渦(wō)發生體(ti)後一定(ding)的距離(li)内,流動(dong)介質和(he)取壓位(wèi)置對管(guan)壁差壓(ya)式渦街(jie)流量計(jì)的測量(liang)影響很(hen)小.
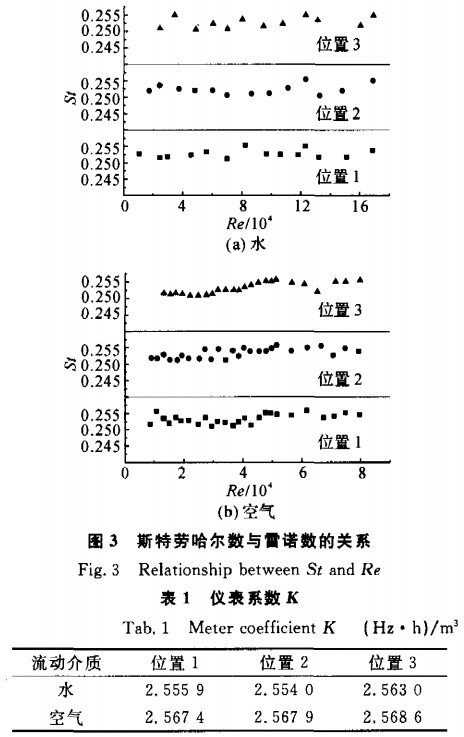
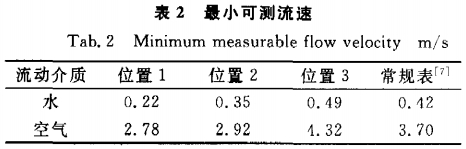
3.2.2最小(xiao)可測流(liu)速
渦街(jiē)流量計(ji)測量下(xià)限的拓(tuo)展一直(zhí)是研究(jiu)的熱點(diǎn).各種情(qíng)況的最(zui)小可測(cè)流速及(ji)常規渦(wō)街流量(liàng)計的測(ce)量下限(xian)列于表(biao)2.在實驗(yan)中,越靠(kao)近發生(sheng)體,旋渦(wo)的旋度(dù)強,測量(liàng)的靈敏(mǐn)度高,不(bu)論是水(shuǐ)還是空(kong)氣,最小(xiao)可測流(liu)量都是(shi)随取壓(yā)位置的(de)後移而(ér)增大.當(dāng)測量水(shuǐ)時,位置(zhì)1的測量(liàng)下限僅(jǐn)爲常規(guī)表的52%;當(dāng)測量空(kōng)氣時,位(wèi)置1的測(cè)量下限(xiàn)爲常規(guī)表的75%,因(yin)此采用(yong)管壁差(cha)壓法能(néng)有效地(dì)降低渦(wo)街流量(liàng)計的測(ce)量下限(xian),将取壓(ya)位置适(shì)當靠近(jìn)發生體(tǐ)能進一(yi)步降低(dī)測量下(xià)限.
引壓(ya)管的影(ying)響
4.1引壓(ya)管動态(tai)特性的(de)數學模(mó)型
根據(jù)流體阻(zǔ)抗法的(de)集中參(can)數模型(xing),若差壓(ya)傳感器(qì)兩根引(yin)壓管的(de)平均長(zhang)度爲Ɩ0,平(píng)均導納(nà)爲YƖ0,輸入(rù)的管壁(bi)正弦脈(mo)動壓力(lì)差△pi=pil-pi2,則傳(chuan)至差壓(ya)傳感器(qì)的差壓(ya)爲

式中(zhōng):F=√ZY爲引壓(yā)管單位(wei)長度的(de)傳播常(cháng)數;Z和Y分(fen)别爲單(dān)位長度(dù)的串聯(lian)阻抗和(hé)并聯導(dǎo)納;Zc=√Z/Y爲管(guan)路的特(te)性阻抗(kang);δ爲差壓(yā)測量的(de)絕對誤(wu)差;K。爲壓(yā)力脈動(dong)影響系(xi)數.
在兩(liǎng)段引壓(ya)管長度(dù)較短且(qie)相差不(bú)大,差壓(yā)傳感器(qi)壓力腔(qiāng)室很小(xiǎo)的條件(jian)下,當輸(shu)人差壓(ya)脈動頻(pin)率ƒ低于(yu)引壓管(guǎn)的基本(běn)頻率ƒ。的(de)1/2時,Kp<0.03,δ值較(jiao)小;當ƒ>0.5ƒ。時(shí),Kp随ƒ的增(zēng).加而顯(xian)著上升(sheng),δ值較大(dà).
4.2管壁差(cha)壓平均(jun)幅值的(de)測最偏(piān)差與讨(tǎo)論
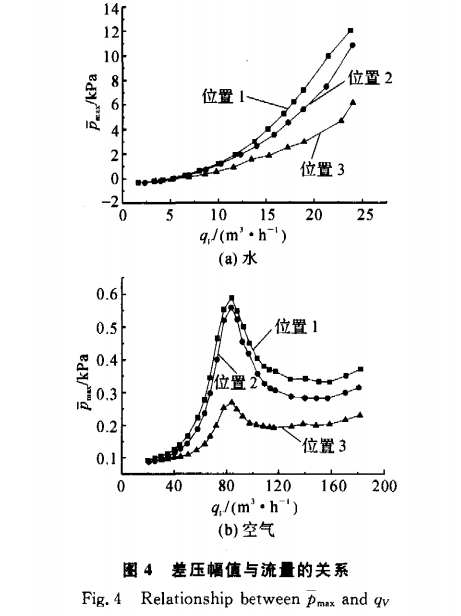
管壁(bì)差壓平(píng)均幅值(zhi)`Pmax定義爲(wei)

式中:Pmax.pmin,;分(fen)别爲第(dì)i個旋渦(wo)周期内(nèi)管壁差(cha)壓的最(zui)大值和(hé)最小值(zhí);N爲檢測(cè)的總周(zhōu)期數. `Pmx值(zhi)反映了(le)旋渦強(qiang)度的大(da)小,應随(sui)流量的(de)增加而(er)增大.實(shí)驗`Pmx與qv的(de)關系如(ru)圖4所示(shi),當圖4(a)中(zhong)給出的(de)是流動(dòng)介質爲(wèi)水時,從(cong)3對不同(tong)取壓位(wei)置測量(liàng)的`Pmx随qv的(de)分布情(qíng)況,可見(jian)3條曲線(xiàn)均随qv的(de)增加而(er)單調遞(di)增,較好(hao)地符合(he)了理論(lun)預測;圖(tú)4(b)中所示(shì)的是流(liú)動介質(zhi)爲空氣(qi)時的情(qíng)況,3條曲(qǔ)線的形(xing)狀相似(si),當qv<83m3/h,`Pmx随流(liu)量的增(zeng)加而增(zeng)大,在qv=83m3/h附(fu)近取得(de)極大值(zhí),當qv>83m3/h,`Pmx不再(zài)随流量(liàng)的增加(jia)而增大(da),而是急(jí)劇下降(jiang)直至qv>120m3/h後(hòu)逐漸平(ping)緩遞增(zēng).
當流量(liàng)qv=83m3/h時,旋渦(wō)頻率ƒ=213Hz,K=2.5680Hz·h/m;引(yin)壓管的(de)長度Ɩ=0.20m,其(qí)固有頻(pin)率ƒ0=c/(4Ɩ)=425Hz,c爲引(yǐn)壓管中(zhong)介質的(de)聲速,則(ze)ƒ=0.5ƒ0..當qv>83m3/h,ƒ>0.5ƒ0,Kp随ƒ的(de)增加而(er)顯著上(shang)升,差壓(yā)測量的(de)絕對誤(wu)差δ值增(zēng)大.因此(cǐ)較低的(de)引壓管(guan)固有頻(pín)率阻礙(ai)了測壓(yā)系統對(dui)動态管(guǎn)壁差壓(yā)的響應(ying),從而造(zao)成較大(dà)的測量(liang)誤差,與(yǔ)理論關(guan)系不符(fu).爲了克(ke)服或減(jiǎn)小引壓(yā)管對測(cè)量的影(yǐng)響,應盡(jìn)量縮短(duǎn)引壓管(guǎn)的長.度(du).但是管(guǎn)壁差壓(ya)幅值的(de)誤差并(bing)沒有影(yǐng)響頻率(lǜ)的測量(liang),對St和K的(de)影響甚(shen)小,也即(ji)流量的(de)測量幾(jǐ)乎不會(huì)受影響(xiǎng),說明管(guan)壁差壓(yā)法的強(qiang)适應性(xing)和穩定(ding)性.
5結論(lun)
(1)在發生(sheng)體下遊(yóu)的一定(dìng)距離内(nèi),取壓位(wei)置對管(guan)壁差壓(yā)式渦街(jie)流量計(jì)的斯特(te)勞哈爾(ěr)數和儀(yí)表系數(shu)的影響(xiǎng)很小;
(2)管(guǎn)壁差壓(yā)式渦街(jiē)流量計(jì)的測量(liang)下限随(suí)取壓位(wèi)置的不(bu)同而顯(xian)著變化(hua),在旋渦(wō)發生體(ti)後的一(yi)定範圍(wei)内,較靠(kào)近發生(sheng)體迎流(liu)面的地(di)方測得(dé)的最小(xiǎo)流速低(di)于遠離(lí)迎流面(mian)的地方(fāng);
(3)引壓管(guǎn)的響應(ying)頻率對(dui)管壁差(chà)壓式渦(wo)街流量(liang)計的測(ce)量有着(zhe)重要的(de)影響,爲(wèi)了保證(zheng)準确測(cè)量,應盡(jin)量縮短(duǎn)引壓管(guǎn)的長度(dù),并且保(bao)證引壓(yā)管固有(yǒu)頻率與(yu)渦街頻(pín)率相差(cha)較大.
由(yóu)于工業(ye)現場的(de)流動狀(zhuang)态複雜(za),因此進(jìn)一步工(gōng)作将圍(wei)繞着該(gai)方法在(zài)旋轉流(liu)、脈動流(liu)等惡劣(lie)工況下(xia)的性能(neng)展開.
本(ben)文來源(yuan)于網絡(luò),如有侵(qīn)權聯系(xi)即删除(chu)!
|