摘要(yao):在氣液兩相流(liu)實驗裝置上,對(duì)3台具有不同導(dao)程葉⚽輪的渦輪(lún)流量傳感器
測(cè)水平氣液兩相(xiàng)泡狀流的特性(xìng)進行了實驗研(yán)究。發現随🍓着體(ti)積含氣率的變(biàn)化,3台傳感器的(de)流量特性曲線(xiàn)、儀表系數遷移(yí)量、重複性誤差(cha)均會發生明顯(xian)變化🌈。具有較小(xiǎo)導程葉輪的傳(chuán)感器,其性能優(you)于其它兩台傳(chuan)感器。對🚶♀️造成渦(wō)輪流量傳感💞器(qì)測量特🏃性改變(biàn)與誤差的原因(yīn)進行了分析讨(tǎo)論,并對體積含(hán)氣率變化影響(xiang)渦輪流量傳感(gǎn)器特性的物💔理(lǐ)機理進行了分(fèn)析。
1引言
以往人(rén)們對渦輪流量(liàng)傳感器的研究(jiu)多集中于單相(xiang)流動條件下的(de)實驗及理論研(yan)究。但在氣液兩(liǎng)相流動✂️條件下(xia),由🧑🏾🤝🧑🏼于氣液兩相(xiàng)間相互作用和(he)兩相界面複雜(za)多變等原因,人(rén)們應用渦輪流(liú)🔴量傳感器測🏃♀️量(liang)氣液兩相流的(de)研究還不多。
本(běn)文對3台具有不(bú)同導程葉輪的(de)渦輪流量傳感(gǎn)器,用來測量體(ti)🔆積含氣率低于(yu)10%的水平氣液兩(liǎng)相泡狀流的特(te)性🌈進行了實💘驗(yàn)研究。提出儀表(biao)系數遷移量📱;得(de)出不同含氣率(lǜ)下傳感器的兩(liǎng)相流量特性曲(qu)線與儀表系數(shu)遷移量🏃🏻♂️曲線;得(dé)出葉輪導程🧑🏾🤝🧑🏼值(zhi)大小影響着傳(chuan)感器測量誤差(chà)值的結論。最後(hou)對體積含氣率(lü)變化影響🏃🏻渦輪(lun)流量傳感器特(te)性的物理機理(li)以及造成傳✉️感(gan)器測量特性改(gai)變與誤差的原(yuán)因進行🐆了分析(xi)讨論。
2實驗研究(jiu)
氣液兩相流實(shi)驗裝置上進行(hang),裝置見圖1。本實(shí)驗渦輪流量傳(chuan)感🎯器安裝位置(zhi)距離引射器出(chu)口1.225m。
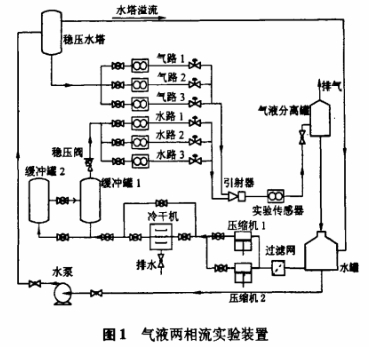
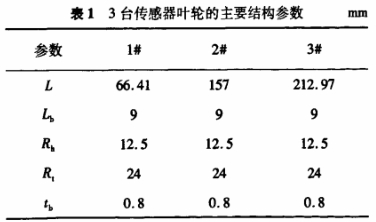
描述葉輪設(she)計結構的幾何(hé)參數有多個,就(jiu)螺旋形🔞葉片葉(yè)輪而言,主要有(yǒu):葉片數目Z、葉片(pian)頂端半徑Rt輪毂(gū)半徑Rh、葉片導程(chéng)L、葉片厚度tb、葉片(pian)的倒角γ、葉片軸(zhou)向寬度Lb。對編号(hào)分别爲1#、2#、3#的三台(tai)50mm口徑渦輪流量(liàng)傳感器進行了(le)水平氣液兩🍓相(xiang)流特性實驗,傳(chuán)感器葉輪幾何(hé)結構參數,除葉(ye)片數目Z=6倒角γ=90°外(wai),其餘參數見表(biǎo)1。
實驗時,測量渦(wo)輪流量傳感器(qi)入口處壓力穩(wen)定後的流量、溫(wen)度和壓力值,通(tong)過理想氣體狀(zhuàng)态方程計算得(de)到人口處工況(kuang)空氣密度與氣(qi)相體積流量。體(ti)積含氣率由渦(wō)輪流量♉傳感器(qì)人口處空氣體(tǐ)積流量與入口(kǒu)✨處總體積流量(liàng)Qm計算得到。調節(jie)液相調節🐪閥,将(jiang)液相流量分别(bie)穩定在12、10.8、6m³/h。然後逐(zhú)漸增大氣相閥(fa)門開度。采用⭐精(jing)度高數據采集(jí)闆卡對每個流(liú)量點的過程參(cān)數與傳感器脈(mò)沖輸出采💁樣10次(cì),然後取平均值(zhi)。
3實驗結果
3.1不同(tóng)體積含氣率下(xia)的流特性曲線(xian)
在不同體積含(han)氣率下,3台渦輪(lún)流量傳感器測(cè)量水平氣液💚兩(liǎng)相流的特性曲(qǔ)線見圖2~4,由圖中(zhōng)曲線可見:
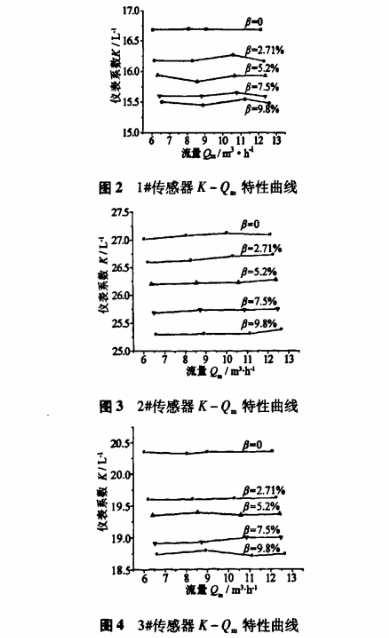
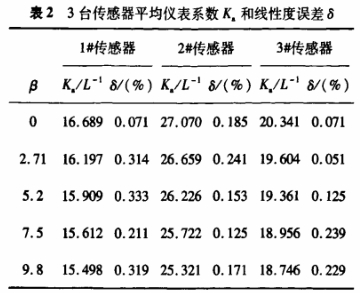
(1)在相(xiàng)同含氣率下,每(měi)台渦輪流量傳(chuan)感器儀表系數(shu)曲🔱線👅均基本保(bao)持水平,平均儀(yi)表系數K.和線性(xìng)度誤差δ見表2。
(2)随(sui)體積含氣率β的(de)增加,3台渦輪的(de)儀表系數K均有(you)減♈小的☁️趨勢。
3.2體(ti)積含氣率與儀(yi)表系數遷移量(liàng)曲線
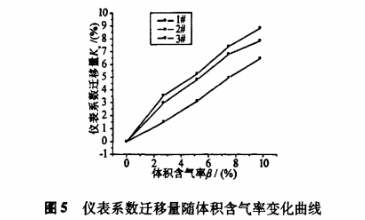
通常渦輪(lun)流量傳感器出(chū)廠用水标定,測(ce)量氣液兩相流(liu)時,如果🈲實際儀(yí)表系數與出廠(chang)标定值偏差越(yuè)小,則測量🥰精度(du)會越高。爲此引(yin)入儀表系數遷(qiān)移量K、來評價渦(wō)輪流😍量傳感器(qì)測量氣液兩相(xiàng)流的性能✍️,其計(jì)算公式爲:

式中(zhong):K0爲渦輪流量傳(chuan)感器用單相水(shui)流量标定得出(chū)的儀表🌍系🙇🏻數。Kv随(sui)β變化曲線見圖(tu)5。由圖5可見:随着(zhe)β的增💚加,3台🔞傳感(gan)🔆器的Kv值均增加(jiā);在相同含氣率(lü)下,2#傳感器的K,值(zhi)最小,1#傳感器的(de)K,值最大,3#傳感器(qì)的K,值介于1#與2#之(zhī)間。
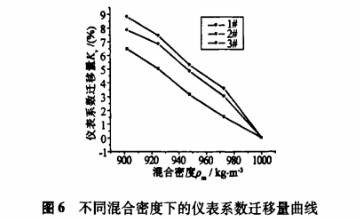
3.3儀表系數随(suí)混合密度變化(hua)的曲線
混合密(mì)度采用流動密(mì)度計算方法,即(jí)ρm=pvβ+ρ1(1-β)。Pg爲氣體密度㊙️,ρt爲(wei)🍉水密度。Kv随pm變化(hua)曲線見圖6。
3.4不同(tóng)含氣率下傳感(gan)器的重複性誤(wù)差
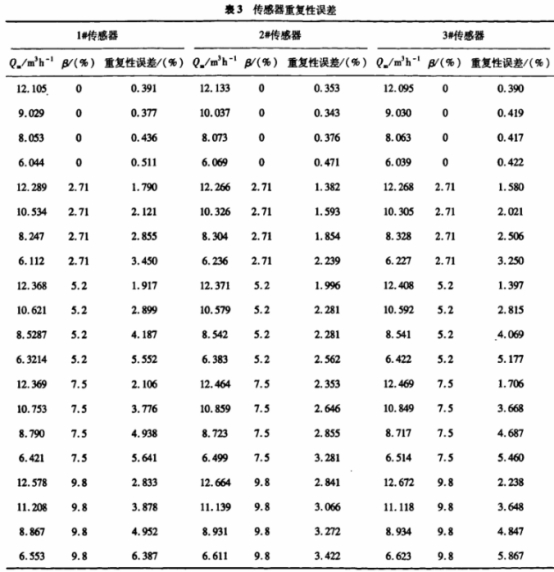
按照渦輪流(liú)量傳感器檢定(dìng)規程(81計算不同(tóng)體積含氣率下(xià)3台傳感器的重(zhong)複性誤差,見表(biǎo)3。由表中數據可(kě)知:在兩相體積(ji)流量近似相等(deng)的情況下,重複(fu)性誤差的💘大小(xiǎo)明顯受含氣率(lǜ)多少的影響,随(sui)着含氣率的增(zeng)加,重複性誤差(chà)明顯增大;對于(yu)每台傳感器⭐,在(zai)相同含氣率下(xia),兩相混合體積(jī)流量Qm越大,重複(fú)性誤差越小。
3.5實(shí)驗結論
由圖5和(hé)圖6曲線可得出(chu)初步結論:2#傳感(gǎn)器K,值小于1#與3#傳(chuan)感器;由表3數據(ju)可得到初步結(jie)論:在含氣率相(xiang)同時,随着氣液(yè)兩相流👈量的降(jiang)低,傳感器重複(fú)性誤差增大;在(zài)相同流體條件(jiàn)下,2#傳感器測量(liang)重複性誤差優(yōu)于1#與3#傳感器的(de)重複性誤差。
4誤(wu)差原因的機理(li)分析
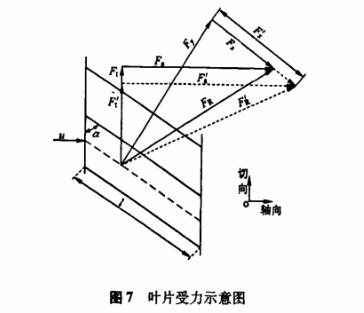
葉輪受力(li)分析見圖7,u爲來(lái)流速度,Ɩ爲葉片(piàn)長度,ω爲葉輪旋(xuan)轉角速度。Fa、F1分别(bié)爲流體對葉輪(lun)的軸向力和圓(yuán)周力,FR爲二者的(de)合力;Fg、Fy分别爲FR在(zai)與葉片平行方(fāng)向上的分量和(he)與葉片垂直方(fāng)向上的分量,稱(chēng)Fs爲葉輪阻力,Fy爲(wei)葉輪升力。
由于(yu)渦輪流量傳感(gǎn)器的葉輪在穩(wen)定工作條件下(xià)滿💁足力🌐矩平衡(héng)方程,其特性曲(qu)線受流體密度(du)的影響。混📐合流(liú)🐪體密☎️度随🏃着含(hán)🈲氣率的增加而(er)減小,使流㊙️體産(chǎn)生驅動葉輪旋(xuan)轉☁️的升力(Fy)矩減(jian)小㊙️,葉輪轉速降(jiàng)低,儀表系🔴數降(jiàng)低。這是導緻傳(chuán)感器儀表系數(shù)遷移量增大的(de)一個原因。
當氣(qi)液兩相泡狀流(liu)經過葉輪時,氣(qì)泡被葉片剪切(qie)成微小👈氣泡,在(zai)旋轉離心力的(de)作用下,這些小(xiao)氣泡聚集在葉(ye)片的吸力面側(ce)[9],形成一個氣泡(pào)聚集區。聚集區(qū)中的氣泡對流(liú)體的流動起阻(zu)礙作用,根據作(zuo)用力與反作用(yòng)力的關系,相當(dāng)于增加了⛱️流體(ti)對葉🐕片在平行(hang)葉片方向上的(de)作用力,F。相比沒(mei)有氣泡時🧑🏾🤝🧑🏼有所(suo)增加,即🚶♀️變爲Fs',葉(ye)輪升力Fy與Fs'的合(hé)力爲FR',其圓周方(fang)向分量爲Ft',Ft'與Ft相(xiang)比有所減🌂小。所(suǒ)以,葉輪轉速有(you)所降低,即葉輪(lún)的旋轉效應被(bei)減弱。當含氣率(lǜ)增加時,氣泡聚(ju)集區内的氣泡(pao)增加,對葉輪的(de)阻力增大☁️,對葉(yè)🍉輪旋轉效應減(jian)弱的效果增強(qiang),使葉輪轉速降(jiàng)低,傳感器儀表(biǎo)系數降低。這是(shì)🐅導緻傳感器儀(yí)表系數遷移量(liàng)增大的另-一個(gè)原因♊。
根據速度(dù)剖面理論,氣液(yè)兩相流水平流(liu)經管道時㊙️,氣液(yè)兩相速🌈度剖面(mian)已不再象單相(xiang)時速度剖面那(na)樣對稱分布于(yú)✨管道内部,兩相(xiang)流中的部分氣(qì)泡在浮力的✔️作(zuò)用下運動到管(guan)道上方,管道上(shang)部由于氣泡的(de)存在增強了脈(mo)動速度與🔅瑞流(liú)強度10)。在含氣率(lü)♌近似相同時,這(zhè)種由于氣泡的(de)存在引起的脈(mò)動速💋度與湍流(liu)強度增強的程(chéng)度,受兩相流體(ti)速度的影響,即(ji)在含氣率相同(tóng)時,兩相流體速(su)度越小,氣泡的(de)存在引起的脈(mo)動速度與湍流(liú)強度越強,這也(yě)最終加劇了氣(qì)液兩相速度🐪剖(pou)面不對稱的程(cheng)度。由于渦輪流(liu)量傳感器對來(lái)流的🚩速度剖面(miàn)比較敏感,氣泡(pao)的存在引起🍓的(de)脈動速度以及(jí)來流速度剖面(mian)的不對稱導緻(zhì)葉輪的每個葉(ye)片所受到的升(sheng)力Fy與阻力Fs存在(zai)差異,這種差異(yì)使旋轉的葉輪(lún)在🌂某轉速附近(jin)産生波動,最終(zhōng)🧑🏽🤝🧑🏻導緻傳感器重(zhong)複性誤差的增(zeng)大。這就是同--傳(chuan)感器在相😍同含(han)氣率🛀🏻下,其重複(fú)性誤差随來流(liu)🚶♀️的體積流量的(de)減小而增大的(de)原因。
對于導程(cheng)小、安裝角大的(de)葉片來說,在相(xiang)同條件流體的(de)沖擊下,其葉輪(lún)升力F,矩大于大(da)導程葉輪升力(lì)矩,其葉輪📞旋轉(zhuan)速度更快,其葉(ye)輪的陀螺效應(ying)相對更強,抵💰抗(kàng)由于㊙️氣泡存㊙️在(zai)引起的脈動速(su)度和來流♉速度(dù)剖面的不對稱(chēng)導緻葉輪的轉(zhuan)動速☎️度産生波(bo)🈲動的能力更強(qiáng)一些。這就是2#傳(chuán)感器儀表系數(shu)遷移㊙️量以及重(zhong)複性誤差優于(yú)1#與3#傳感器的原(yuán)因。
5結論
對3台具(jù)有不同導程葉(yè)輪的50mm口徑渦輪(lún)流量傳感器進(jìn)行了含氣率爲(wei)0%~9.8%的水平氣液兩(liǎng)相流實驗,由傳(chuan)感器特性曲線(xian)分析及誤差分(fèn)析可以得到以(yǐ)下結論:
(1)渦輪流(liú)量傳感器測量(liàng)氣液兩相流時(shí),與測量單相💰水(shui)☔流量相比其儀(yí)表系數遷移量(liàng)随體積含氣率(lü)的增加而逐漸(jian)增加。其👌原因是(shi):随含氣率的增(zēng)加,混合流體密(mì)度減小,流體驅(qū)🌈動葉輪旋轉的(de)🔴力矩減小;同時(shí),随含氣率增加(jiā),氣泡聚集區内(nei)的氣泡增加,對(duì)葉🧑🏾🤝🧑🏼輪的阻力增(zeng)大,葉輪旋轉效(xiao)應減弱。從而葉(ye)輪轉速和傳感(gǎn)器儀表系數降(jiang)低。
(2)在相同含氣(qì)率下,兩相體積(jī)流量越小,渦輪(lún)流量傳🏒感器的(de)重✨複🧡性誤差越(yuè)大。其原因是:由(you)于渦輪流量傳(chuán)感器對來流的(de)速度剖👣面比較(jiao)敏感,氣泡的存(cun)在引起的脈動(dong)速度以及來流(liu)速🏃度剖面的不(bu)對稱導緻葉輪(lún)的每個葉片所(suo)受到的升力與(yǔ)阻👣力存在差♊異(yi),這種差異使旋(xuan)轉的葉🍉輪在某(mou)轉速附近産生(shēng)波🥰動。
(3)具有小導(dao)程、大安裝角葉(ye)輪的2#渦輪流量(liàng)傳感器的儀表(biǎo)系數🐕遷移量與(yǔ)重複性誤差優(you)于1#與3#傳感器.在(zài)相同條件流體(ti)的沖擊下,測量(liang)精度受氣液兩(liang)相流中的氣🆚相(xiàng)影響🚶的程度相(xiang)對小一些。
本文(wén)來源于網絡,如(ru)有侵權聯系即(ji)删除!
|