摘(zhai)摘要(yao):四電(dian)極外(wai)流式(shi)電磁(ci)流量(liang)計
是(shi)一種(zhong)新型(xing)的測(ce)量注(zhu)入剖(pou)面流(liu)量的(de)測井(jing)理想(xiang)儀器(qi),廣泛(fan)應用(yong)于油(you)田注(zhu)水井(jing)、注聚(ju)井的(de)流量(liang)測量(liang)。目前(qian)四電(dian)極外(wai)流式(shi)電磁(ci)流量(liang)計的(de)研究(jiu)主要(yao)在實(shi)際環(huan)境中(zhong)開展(zhan),實驗(yan)效率(lü)低、成(cheng)本高(gao)。建立(li)了四(si)電極(ji)外流(liu)式電(dian)磁流(liu)量計(ji)的準(zhun)确的(de)有限(xian)元模(mo)型,将(jiang)強耦(ou)合的(de)方法(fa)應用(yong)在電(dian)磁結(jie)構流(liu)體耦(ou)合.上(shang),并在(zai)不同(tong)流速(su)下開(kai)展了(le)模型(xing)的響(xiang)應及(ji)誤差(cha)分析(xi)。研究(jiu)表明(ming),該有(you)限元(yuan)模型(xing)在一(yi)定程(cheng)度上(shang)可用(yong)于電(dian)磁流(liu)量計(ji)的流(liu)場仿(pang)真分(fen)析。流(liu)速較(jiao)小時(shi),有限(xian)元仿(pang)真結(jie)果與(yu)實驗(yan)誤差(cha)較大(da);流速(su)較大(da)時,流(liu)場趨(qu)近于(yu)勻速(su)場,仿(pang)真結(jie)果與(yu)實驗(yan)結果(guo)誤差(cha)較小(xiao)。
在油(you)田三(san)次采(cai)油中(zhong),注聚(ju)合物(wu)驅油(you)是提(ti)高原(yuan)油采(cai)收率(lü)的重(zhong)要手(shou)段之(zhi)一,它(ta)比水(shui)驅效(xiao)果提(ti)高了(le)20%左右(you);現場(chang)實驗(yan)表明(ming),過去(qu)常用(yong)的注(zhu)入剖(pou)面測(ce)井儀(yi)器已(yi)經不(bu)适合(he)注聚(ju)合物(wu)測井(jing)的剖(pou)面測(ce)試的(de)要求(qiu)。電磁(ci)流量(liang)計是(shi)一種(zhong)新型(xing)的測(ce)量注(zhu)入剖(pou)面的(de)儀器(qi),較好(hao)地解(jie)決了(le)聚合(he)物注(zhu)入剖(pou)面的(de)測井(jing)問題(ti)。
四電(dian)極外(wai)流式(shi)電磁(ci)流量(liang)計是(shi)針對(dui)油田(tian)應用(yong)開發(fa)的一(yi)種特(te)殊電(dian)磁流(liu)量計(ji),其不(bu)僅具(ju)有普(pu)通工(gong)業電(dian)磁流(liu)量計(ji)無節(jie)流阻(zu)流,不(bu)易堵(du)塞,耐(nai)腐蝕(shi)性好(hao),測量(liang)精度(du)不受(shou)被測(ce)介質(zhi)溫度(du)、黏度(du)、密度(du)、壓力(li)等物(wu)理參(can)數的(de)影響(xiang)且其(qi)示值(zhi)在一(yi)定的(de)電導(dao)率範(fan)圍内(nei)與被(bei)标定(ding)的液(ye)體種(zhong)類無(wu)關等(deng)特點(dian),還具(ju)有體(ti)積小(xiao)、耐高(gao)溫高(gao)壓、流(liu)場不(bu)對稱(cheng)對測(ce)量精(jing)度影(ying)響較(jiao)小的(de)優點(dian),可以(yi)作爲(wei)獨立(li)設備(bei)進行(hang)井下(xia)測量(liang),也可(ke)以作(zuo)爲複(fu)雜智(zhi)能測(ce)調系(xi)統的(de)數據(ju)采集(ji)終端(duan)。其基(ji)本原(yuan)理是(shi)基于(yu)法拉(la)第電(dian)磁感(gan)應定(ding)律,即(ji)當導(dao)電液(ye)體流(liu)過磁(ci)場作(zuo)切割(ge)磁力(li)線運(yun)動時(shi),則在(zai)垂直(zhi)于流(liu)速向(xiang)量和(he)磁場(chang)向量(liang)的方(fang)向上(shang)會産(chan)生一(yi)個與(yu)流量(liang)大小(xiao)成正(zheng)比的(de)感應(ying)電動(dong)勢,其(qi)表達(da)式爲(wei)

式中(zhong):Ɛab爲感(gan)應電(dian)動勢(shi);α爲電(dian)極1的(de)位置(zhi)坐标(biao);b爲電(dian)極2的(de)位置(zhi)坐标(biao);B爲流(liu)體微(wei)元處(chu)的磁(ci)場強(qiang)度;V爲(wei)流體(ti)微元(yuan)的速(su)度;dl爲(wei)流體(ti)微元(yuan)的長(zhang)度。
因(yin)此可(ke)知,通(tong)過測(ce)得感(gan)應電(dian)動勢(shi)的大(da)小,即(ji)可測(ce)得流(liu)量大(da)小。
目(mu)前,在(zai)電磁(ci)流量(liang)計方(fang)面的(de)有限(xian)元建(jian)模研(yan)究較(jiao)少。1996年(nian),MICHALSKI等基(ji)于有(you)限元(yuan)建立(li)的不(bu)同形(xing)狀和(he)尺寸(cun)的流(liu)體管(guan)道數(shu)值模(mo)型對(dui)勵磁(ci)線圈(quan)的橫(heng)截面(mian)形狀(zhuang)進行(hang)尋優(you),以獲(huo)得均(jun)勻的(de)矢量(liang)積3];2002年(nian),MICHALSKI等用(yong)有限(xian)元方(fang)法建(jian)立了(le)電磁(ci)流量(liang)計勵(li)磁線(xian)圈的(de)3D混合(he)數學(xue)模型(xing);2009年,金(jin)甯德(de)等用(yong)Ansys對四(si)電極(ji)外流(liu)式電(dian)磁流(liu)量計(ji)建立(li)了二(er)維有(you)限元(yuan)模型(xing),得出(chu)了數(shu)值模(mo)拟結(jie)果,提(ti)出了(le)四電(dian)極外(wai)流式(shi)電磁(ci)流量(liang)計的(de)理論(lun)分析(xi)方法(fa)(但這(zhe)個模(mo)型無(wu)法進(jin)行仿(pang)真實(shi)驗);邬(wu)惠峰(feng)等建(jian)立了(le)普通(tong)工業(ye)内流(liu)式電(dian)磁流(liu)量計(ji)的二(er)維仿(pang)真模(mo)型°0(内(nei)流式(shi)和外(wai)流式(shi)因其(qi)應用(yong)的場(chang)合不(bu)同,整(zheng)個流(liu)量計(ji)的結(jie)構也(ye)不同(tong));2010年,張(zhang)志剛(gang)利用(yong)Matlab對四(si)電極(ji)外流(liu)式電(dian)磁流(liu)量計(ji)權重(zhong)函數(shu)分布(bu)情況(kuang)進行(hang)了理(li)論推(tui)導和(he)仿真(zhen)計算(suan),爲進(jin)一步(bu)開展(zhan)四電(dian)極外(wai)流式(shi)電磁(ci)流量(liang)計的(de)研究(jiu)和開(kai)發設(she)計奠(dian)定了(le)理論(lun)基礎(chu)”。大量(liang)研究(jiu)表明(ming),有限(xian)元方(fang)法是(shi)一種(zhong)研究(jiu)電磁(ci)流量(liang)計的(de)有效(xiao)手段(duan)。由于(yu)四電(dian)極外(wai)流式(shi)電磁(ci)流量(liang)計系(xi)統本(ben)身受(shou)結構(gou)參數(shu)和電(dian)氣參(can)數等(deng)衆多(duo)參數(shu)的影(ying)響,影(ying)響規(gui)律複(fu)雜,改(gai)變某(mou)--個參(can)數就(jiu)需要(yao)變換(huan)硬件(jian),實驗(yan)效率(lü)低而(er)且成(cheng)本高(gao)。因此(ci)采用(yong)有限(xian)元方(fang)法建(jian)立能(neng)反映(ying)其特(te)性的(de)多物(wu)理場(chang)仿真(zhen)模型(xing),開展(zhan)電磁(ci)流量(liang)計勵(li)磁規(gui)律和(he)三維(wei)尺度(du)下磁(ci)場分(fen)布規(gui)律及(ji)影響(xiang)因素(su)研究(jiu),可優(you)化磁(ci)場設(she)計參(can)數,指(zhi)導傳(chuan)感器(qi)的實(shi)驗與(yu)設計(ji),顯著(zhe)降低(di)成本(ben),提高(gao)開發(fa)準确(que)率及(ji)效率(lü)。
1流量(liang)計場(chang)路耦(ou)合有(you)限元(yuan)模型(xing)的建(jian)立
1.1三(san)維實(shi)體模(mo)型的(de)建立(li)與簡(jian)化
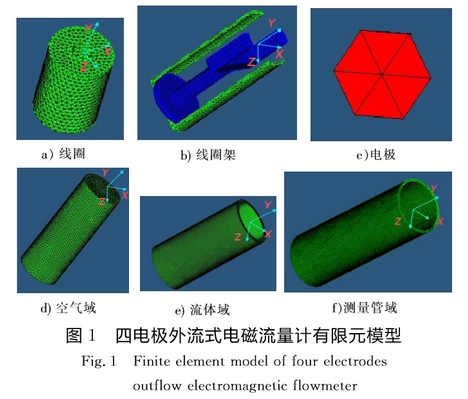
電(dian)磁流(liu)量計(ji)實體(ti)模型(xing)中不(bu)僅包(bao)括線(xian)圈、線(xian)圈架(jia)、電極(ji)、測量(liang)管、絕(jue)緣套(tao)、空氣(qi)域、流(liu)場域(yu)等主(zhu)要部(bu)件,還(hai)包括(kuo)平衡(heng)柱體(ti)、平衡(heng)柱套(tao)、電纜(lan)插頭(tou)過線(xian)塞座(zuo)過線(xian)塞套(tao)等輔(fu)助零(ling)件。由(you)于輔(fu)件對(dui)磁場(chang)和電(dian)極的(de)感應(ying)電動(dong)勢沒(mei)有影(ying)響,同(tong)時各(ge)個主(zhu)要部(bu)件上(shang)都加(jia)工有(you)裝配(pei)特征(zheng),且這(zhe)些特(te)征都(dou)對磁(ci)場和(he)信号(hao)也沒(mei)有影(ying)響,因(yin)此爲(wei)了提(ti)高計(ji)算效(xiao)率,可(ke)對傳(chuan)感器(qi)模型(xing)進行(hang)簡化(hua)。簡化(hua)後的(de)模型(xing)包括(kuo):1)線圈(quan),如圖(tu)1a);2)線圈(quan)架,如(ru)圖1b);3)電(dian)極,如(ru)圖1c);4)空(kong)氣域(yu),如圖(tu)1d);5)流體(ti)域,如(ru)圖1e);6)測(ce)量管(guan)域,如(ru)圖1f)。
在(zai)Solidworks中建(jian)立了(le)簡化(hua)的傳(chuan)感器(qi)實體(ti)模型(xing),然後(hou)将其(qi)導入(ru)強大(da)的網(wang)格劃(hua)分軟(ruan)件HyperMesh中(zhong)進行(hang)布爾(er)運算(suan)和網(wang)格劃(hua)分,由(you)于實(shi)體模(mo)型導(dao)入後(hou)會丢(diu)失體(ti)信息(xi),因此(ci)模型(xing)導入(ru)後要(yao)重新(xin)利用(yong)各個(ge)實體(ti)的面(mian)重新(xin)生成(cheng)體。
1.2有(you)限元(yuan)模型(xing)的前(qian)處理(li)及設(she)置
Ansys在(zai)工程(cheng)領域(yu)強大(da)的求(qiu)解能(neng)力衆(zhong)所周(zhou)知(8],故(gu)采用(yong)Ansys軟件(jian)作爲(wei)電磁(ci)場求(qiu)解軟(ruan)件。由(you)于整(zheng)個有(you)限元(yuan)模型(xing)中的(de)各個(ge)部件(jian)都是(shi)三維(wei)實體(ti),模型(xing)尺寸(cun)頗大(da),在進(jin)行網(wang)格劃(hua)分時(shi)會有(you)大量(liang)網格(ge)産生(sheng),增大(da)計算(suan)量,而(er)該模(mo)型中(zhong)除了(le)流體(ti)域和(he)電極(ji)是計(ji)算域(yu)外,其(qi)他部(bu)分都(dou)不需(xu)要參(can)與計(ji)算,因(yin)此将(jiang)線圈(quan)、線圈(quan)架、電(dian)極的(de)網格(ge)大小(xiao)設置(zhi)爲2mm,空(kong)氣域(yu)的網(wang)格大(da)小設(she)置爲(wei)3mm,流體(ti)域的(de)網格(ge)大小(xiao)設置(zhi)爲1mm。
有(you)限元(yuan)網格(ge)的質(zhi)量直(zhi)接影(ying)響計(ji)算精(jing)度,采(cai)用自(zi)動網(wang)格劃(hua)分,單(dan)元形(xing)狀爲(wei)四面(mian)體,粗(cu)網格(ge)和細(xi)網格(ge)之間(jian)過渡(du)并不(bu)光滑(hua),因此(ci)将流(liu)體域(yu)和空(kong)氣域(yu)之間(jian)的測(ce)量管(guan)域的(de)網格(ge)單元(yuan)大小(xiao)設置(zhi)爲2mm。網(wang)格劃(hua)分後(hou),導入(ru)Anrsys中進(jin)行單(dan)元類(lei)型、材(cai)料、實(shi)常數(shu)、載荷(he)、邊界(jie)條件(jian)和場(chang)路耦(ou)合單(dan)元設(she)置。線(xian)圈用(yong)銅線(xian)實現(xian),匝數(shu)共6500匝(za),其截(jie)面積(ji)爲2.72×10-4:mm²,體(ti)積爲(wei)1.49×10-5mm3;線圈(quan)坐标(biao)系單(dan)獨定(ding)義爲(wei)局部(bu)柱坐(zuo)标系(xi),軸向(xiang)爲正(zheng)Y方向(xiang),其餘(yu)部件(jian)的坐(zuo)标系(xi)使用(yong)全局(ju)笛卡(ka)爾坐(zuo)标系(xi),軸向(xiang)爲正(zheng)Y方向(xiang)。各個(ge)部件(jian)的材(cai)料參(can)數設(she)置見(jian)表1。
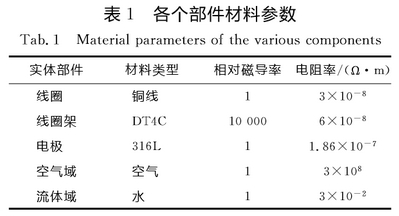
爲(wei)了實(shi)現勵(li)磁方(fang)式的(de)可編(bian)程,需(xu)要把(ba)線圈(quan)單元(yuan)耦合(he)到電(dian)路,因(yin)此建(jian)立2個(ge)Circu124分别(bie)實現(xian)獨立(li)電壓(ya)源單(dan)元和(he)耦合(he)單元(yuan),V;節點(dian)的電(dian)位定(ding)義爲(wei)0,然後(hou)将線(xian)圈單(dan)元的(de)任意(yi)-一個(ge)節點(dian)定義(yi)爲耦(ou)合單(dan)元的(de)K節點(dian)以實(shi)現耦(ou)合,具(ju)體如(ru)圖2所(suo)示。.
2模(mo)型校(xiao)驗
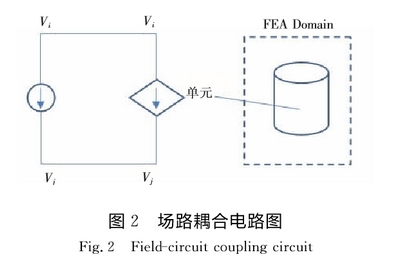
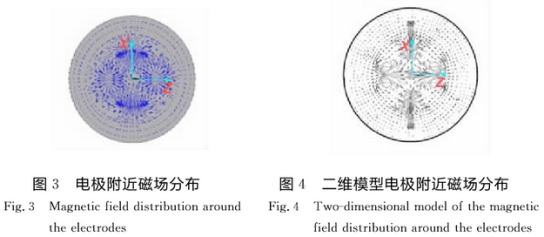
爲(wei)了保(bao)證模(mo)型的(de)正确(que)率,對(dui)建立(li)的四(si)電極(ji)外流(liu)式電(dian)磁流(liu)量傳(chuan)感器(qi)的三(san)維有(you)限元(yuan)模型(xing),從2個(ge)方面(mian)進行(hang)了校(xiao)驗:首(shou)先,給(gei)有限(xian)元模(mo)型施(shi)加恒(heng)值電(dian)流激(ji)勵,選(xuan)用靜(jing)态求(qiu)解類(lei)型,将(jiang)模型(xing)最外(wai)圈節(jie)點的(de)Ax,Ay,Ax自由(you)度均(jun)設爲(wei)0,選擇(ze)所有(you)單元(yuan)後進(jin)行求(qiu)解,然(ran)後在(zai)後處(chu)理器(qi)中讀(du)入結(jie)果,畫(hua)出電(dian)極附(fu)近的(de)磁場(chang);分布(bu),如圖(tu)3所示(shi),磁場(chang)分布(bu)符合(he)金甯(ning)德等(deng)數值(zhi)分析(xi)的結(jie)果'5],如(ru)圖4所(suo)示;其(qi)次,在(zai)現有(you)模型(xing)基礎(chu)上加(jia)密網(wang)格單(dan)元,所(suo)得感(gan)應電(dian)動勢(shi)大小(xiao)前後(hou)誤差(cha)小于(yu)5%,從而(er)保證(zheng)有限(xian)元計(ji)算結(jie)果不(bu)受網(wang)格質(zhi)量變(bian)化的(de)影響(xiang)。綜上(shang)所述(shu),該有(you)限元(yuan)模型(xing)是準(zhun)确的(de),可用(yong)來進(jin)行仿(pang)真研(yan)究。
3不(bu)同流(liu)速下(xia)模型(xing)的響(xiang)應及(ji)誤差(cha)分析(xi)
耦合(he)分析(xi)分2種(zhong)方法(fa):強耦(ou)合(或(huo)稱緊(jin)耦合(he))和弱(ruo)耦合(he)(或稱(cheng)松耦(ou)合)。強(qiang)耦合(he)通過(guo)單元(yuan)矩陣(zhen)或荷(he)載向(xiang)量把(ba)耦合(he)作用(yong)構造(zao)到控(kong)制方(fang)程中(zhong),然後(hou)對控(kong)制方(fang)程直(zhi)接求(qiu)解,其(qi)缺點(dian)是在(zai)構造(zao)控制(zhi)方程(cheng)過程(cheng)中常(chang)常不(bu)得不(bu)對問(wen)題進(jin)行某(mou)些簡(jian)化,有(you)時候(hou)計算(suan)準确(que)程度(du)較難(nan)保證(zheng)。弱耦(ou)合是(shi)在每(mei)一步(bu)内分(fen)别對(dui)每一(yi)種場(chang)方程(cheng)進行(hang)一次(ci)求解(jie),通過(guo)把第(di)1個物(wu)理場(chang)的結(jie)果作(zuo)爲外(wai)荷載(zai)加于(yu)第2個(ge)物理(li)場來(lai)實現(xian)2個場(chang)的耦(ou)合。其(qi)優點(dian)是可(ke)以利(li)用現(xian)有的(de)通用(yong)流場(chang)和電(dian)磁場(chang)軟件(jian),并且(qie)可以(yi)分别(bie)對每(mei)--個軟(ruan)件單(dan)獨地(di)制定(ding)合适(shi)的求(qiu)解方(fang)法;缺(que)點是(shi)計算(suan)過程(cheng)比較(jiao)複雜(za)。強耦(ou)合通(tong)常适(shi)合于(yu)對耦(ou)合場(chang)的理(li)論分(fen)析,弱(ruo)耦合(he)适用(yong)于對(dui)耦合(he)場的(de)數值(zhi)計算(suan)。
仿真(zhen)對象(xiang)的外(wai)徑尺(chi)寸是(shi)38mm,其工(gong)作的(de)管道(dao)内徑(jing)爲46mm,根(gen)據截(jie)面積(ji)相等(deng)的原(yuan)則,其(qi)等效(xiao)管徑(jing)爲26mm。當(dang)雷諾(nuo)數Re<2000時(shi),管道(dao)内流(liu)動狀(zhuang)态爲(wei)層流(liu);當4000>Re>2000時(shi),管道(dao)内流(liu)動狀(zhuang)态不(bu)确定(ding);當Re>4000時(shi),管道(dao)内流(liu)動狀(zhuang)态爲(wei)湍流(liu)。當流(liu)動狀(zhuang)态爲(wei)湍流(liu)時,由(you) 可計(ji)算出(chu)紊流(liu)流動(dong)對應(ying)的最(zui)小平(ping)均流(liu)速V=0.092m/s.
可計(ji)算出(chu)紊流(liu)流動(dong)對應(ying)的最(zui)小平(ping)均流(liu)速V=0.092m/s.
式(shi)中:V爲(wei)平均(jun)流速(su);D爲圓(yuan)管直(zhi)徑,取(qu)26mm;ʋ爲運(yun)動黏(nian)度,取(qu)0.6×10-6m2/s。
因此(ci),當管(guan)道内(nei)平均(jun)流速(su)V>0.092m/s時,管(guan)道内(nei)的流(liu)動狀(zhuang)态爲(wei)紊流(liu);事實(shi)上,四(si)電極(ji)外流(liu)式電(dian)磁流(liu)量計(ji)在工(gong)作的(de)時候(hou),管道(dao)内大(da)多數(shu)的流(liu)動速(su)度都(dou)大于(yu)這個(ge)值。當(dang)管道(dao)内的(de)流動(dong)狀态(tai)爲紊(wen)流時(shi),用CFD軟(ruan)件進(jin)行流(liu)場分(fen)析、計(ji)算,通(tong)過CFD模(mo)拟,可(ke)以分(fen)析并(bing)且顯(xian)示流(liu)體流(liu)動過(guo)程中(zhong)發生(sheng)的現(xian)象,及(ji)時預(yu)測流(liu)體在(zai)模拟(ni)區域(yu)的流(liu)動性(xing)能[10],用(yong)有限(xian)元軟(ruan)件Ansys中(zhong)的FLOTRANCFD模(mo)塊對(dui)其流(liu)場進(jin)行仿(pang)真分(fen)析,計(ji)算結(jie)果如(ru)圖5所(suo)示。
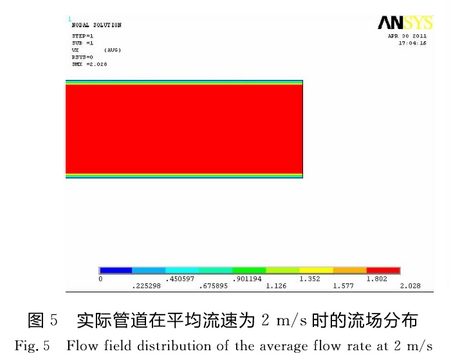
在(zai)近壁(bi)0.2mm處速(su)度較(jiao)小,其(qi)餘位(wei)置都(dou)接近(jin)平均(jun)速度(du)。基于(yu)此,可(ke)以将(jiang)流體(ti)等效(xiao)爲一(yi)個勻(yun)速導(dao)體,用(yong)強耦(ou)合的(de)方法(fa)進行(hang)電磁(ci)流場(chang)耦合(he)的分(fen)析。
在(zai)紊流(liu)場共(gong)選定(ding)了10個(ge)不同(tong)的流(liu)量值(zhi),獨立(li)電壓(ya)源編(bian)程爲(wei)兩值(zhi)矩形(xing)波,幅(fu)值爲(wei)15V,頻率(lü)爲1Hz,對(dui)流量(liang)數據(ju)進行(hang)了仿(pang)真計(ji)算,并(bing)在實(shi)驗台(tai)上得(de)出了(le)實驗(yan)數據(ju),實驗(yan)台采(cai)用精(jing)度爲(wei)0.5%的電(dian)磁流(liu)量計(ji)讀取(qu)流量(liang)值,用(yong)信号(hao)處理(li)電路(lu)采集(ji)四電(dian)極外(wai)流式(shi)電磁(ci)流量(liang)計的(de)感應(ying)電動(dong)勢信(xin)号,通(tong)過串(chuan)口輸(shu)入到(dao)計算(suan)機顯(xian)示,實(shi)驗台(tai)原理(li)圖如(ru)圖6所(suo)示,最(zui)後對(dui)這2種(zhong)數據(ju)進行(hang)了誤(wu)差分(fen)析,結(jie)果見(jian)表2。
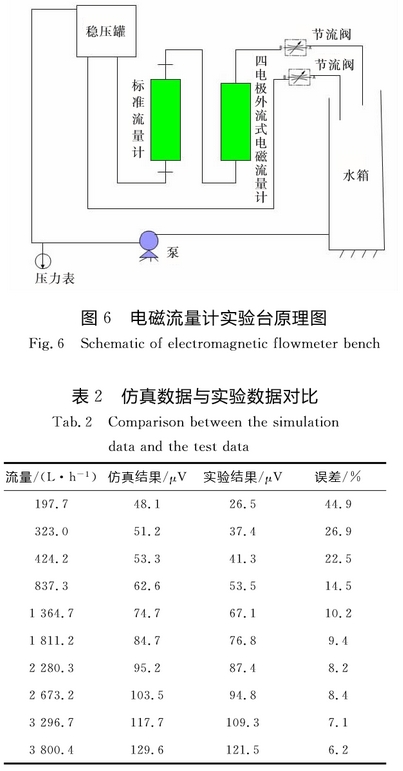
從(cong)實驗(yan)結果(guo)和仿(pang)真結(jie)果的(de)誤差(cha)來看(kan),流速(su)較小(xiao)的時(shi)候誤(wu)差非(fei)常大(da),随着(zhe)流速(su)的加(jia)快,誤(wu)差逐(zhu)漸減(jian)小。這(zhe)是因(yin)爲流(liu)速越(yue)大,流(liu)場就(jiu)越趨(qu)近于(yu)勻速(su)場,仿(pang)真計(ji)算的(de)方法(fa)越接(jie)近真(zhen)實情(qing)況。誤(wu)差一(yi)方面(mian)是由(you)仿真(zhen)模型(xing)的簡(jian)化引(yin)起的(de),另一(yi)方面(mian)是由(you)信号(hao)處理(li)電路(lu)引起(qi)的,仿(pang)真模(mo)型反(fan)映了(le)實際(ji)的情(qing)況,可(ke)以用(yong)于勵(li)磁技(ji)術實(shi)驗等(deng)的理(li)論分(fen)析。
4結(jie)語
通(tong)過有(you)限元(yuan)方法(fa)建立(li)了四(si)電極(ji)電磁(ci)流量(liang)計的(de)仿真(zhen)模型(xing),從2個(ge)方面(mian)對模(mo)型進(jin)行了(le)校驗(yan),驗證(zheng)了模(mo)型的(de)正确(que)率。在(zai)不同(tong)平均(jun)流速(su)下,用(yong)強耦(ou)合的(de)方法(fa)仿真(zhen)計算(suan)了模(mo)型的(de)響應(ying),并計(ji)算了(le)誤差(cha)。研究(jiu)表明(ming),該有(you)限元(yuan)模型(xing)在一(yi)定程(cheng)度上(shang)可用(yong)于電(dian)磁結(jie)構流(liu)場的(de)仿真(zhen)分析(xi),流速(su)較小(xiao)時,有(you)限元(yuan)仿真(zhen)結果(guo)與實(shi)驗誤(wu)差較(jiao)大;流(liu)速較(jiao)大時(shi),流場(chang)趨近(jin)于勻(yun)速場(chang),仿真(zhen)結果(guo)與實(shi)驗結(jie)果誤(wu)差較(jiao)小。
本(ben)文來(lai)源于(yu)網絡(luo),如有(you)侵權(quan)聯系(xi)即删(shan)除!