摘要(yao):目前(qian)對于(yu)渦街(jie)流量(liang)計
漩(xuan)渦發(fa)生體(ti)的位(wei)置研(yan)究僅(jin)局限(xian)于二(er)維的(de)仿真(zhen)研究(jiu),但實(shi)際流(liu)💜體撞(zhuang)擊漩(xuan)渦發(fa)生體(ti)是流(liu)體三(san)維模(mo)型。鑒(jian)于二(er)維💋仿(pang)真并(bing)不能(neng)完全(quan)對實(shi)際流(liu)體撞(zhuang)擊漩(xuan)渦發(fa)生體(ti)的流(liu)場進(jin)行驗(yan)證,采(cai)用數(shu)值仿(pang)真軟(ruan)件平(ping)Ansys+Workbench+FLUENT,根👅據(ju)實際(ji)渦街(jie)發生(sheng)體的(de)機械(xie)尺寸(cun)建立(li)相應(ying)的三(san)維仿(pang)真模(mo)型。并(bing)對仿(pang)真模(mo)型進(jin)行網(wang)格細(xi)🎯分,再(zai)通過(guo)N—s方‼️程(cheng)進行(hang)求解(jie)計算(suan),通過(guo)仿真(zhen)與在(zai)線實(shi)驗對(dui)比驗(yan)證表(biao)明通(tong)過FIUENT軟(ruan)件對(dui)實際(ji)渦街(jie)流場(chang)進♊行(hang)仿真(zhen)的可(ke)行性(xing)🌈。最終(zhong)利用(yong)FLUENT軟件(jian),對不(bu)同流(liu)速,通(tong)過調(diao)整發(fa)生體(ti)平移(yi)的位(wei)置最(zui)終确(que)定發(fa)生體(ti)位置(zhi)對渦(wo)街信(xin)号的(de)影響(xiang),從而(er)确定(ding)發生(sheng)體允(yun)許最(zui)大的(de)平移(yi)位✂️置(zhi)占。
1引(yin)言
随(sui)着渦(wo)街流(liu)量計(ji)在國(guo)内各(ge)行各(ge)業的(de)使用(yong)量逐(zhu)漸增(zeng)大,各(ge)高校(xiao)、研究(jiu)所和(he)流量(liang)計生(sheng)産廠(chang)商的(de)學者(zhe)和研(yan)究人(ren)員也(ye)對此(ci)展開(kai)了各(ge)方面(mian)的研(yan)究,渦(wo)街流(liu)場的(de)數值(zhi)仿真(zhen)的研(yan)究和(he)實現(xian)也是(shi)其中(zhong)一個(ge)重點(dian)]。
基于(yu)渦街(jie)流量(liang)計的(de)測量(liang)原理(li)渦街(jie)發生(sheng)體的(de)設計(ji)要求(qiu)就尤(you)爲💃🏻重(zhong)要,而(er)在實(shi)際設(she)計生(sheng)産當(dang)中不(bu)能保(bao)證發(fa)生體(ti)的中(zhong)🌏心位(wei)置在(zai)管道(dao)的中(zhong)軸線(xian)上,發(fa)生體(ti)與管(guan)道中(zhong)軸線(xian)偏離(li)多💋少(shao)會對(dui)最終(zhong)的測(ce)量産(chan)生影(ying)響需(xu)要重(zhong)♈複更(geng)換發(fa)🏒生體(ti),操作(zuo)起來(lai)費時(shi)費力(li)。鑒于(yu)以上(shang)原因(yin)對進(jin)行對(dui)渦街(jie)發生(sheng)體移(yi)動位(wei)置進(jin)行仿(pang)真研(yan)究,通(tong)過仿(pang)真結(jie)果來(lai)指導(dao)物理(li)實驗(yan),并根(gen)🈲據物(wu)🔞理實(shi)驗結(jie)果進(jin)一步(bu)完善(shan)🆚傳感(gan)器結(jie)構。
2渦(wo)街流(liu)量計(ji)原理(li)
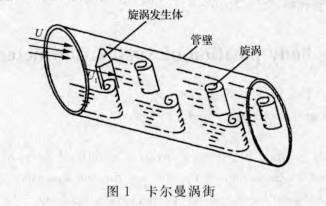
渦街(jie)流量(liang)計利(li)用流(liu)體振(zhen)動原(yuan)理進(jin)行流(liu)量測(ce)量,在(zai)特定(ding)的流(liu)動條(tiao)件下(xia),流體(ti)-部分(fen)動能(neng)轉化(hua)爲振(zhen)動,其(qi)振動(dong)頻率(lü)與流(liu)速(流(liu)☁️量)有(you)确定(ding)的比(bi)例關(guan)系。1878年(nian)斯特(te)勞哈(ha)爾(Strouhal)發(fa)表了(le)關于(yu)流體(ti)振動(dong)🧡頻率(lü)與流(liu)速關(guan)系的(de)文章(zhang)的。渦(wo)街流(liu)量計(ji)的基(ji)本原(yuan)😄理是(shi):在與(yu)被測(ce)介質(zhi)🍉流向(xiang)垂直(zhi)的方(fang)向放(fang)置--個(ge)非流(liu)線型(xing)旋渦(wo)發生(sheng)體,當(dang)🤞流體(ti)流過(guo)該旋(xuan)渦發(fa)生體(ti)時,在(zai)🎯發生(sheng)體後(hou)方兩(liang)側交(jiao)🙇🏻替地(di)分離(li)釋放(fang)出兩(liang)列規(gui)則的(de)交錯(cuo)排列(lie)的旋(xuan)渦,稱(cheng)爲馮(feng).卡爾(er)曼渦(wo)街們(men),如圖(tu)1所示(shi)。當旋(xuan)渦發(fa)生體(ti)右(或(huo)左)下(xia)方産(chan)生一(yi)個旋(xuan)渦後(hou),在旋(xuan)渦發(fa)生體(ti)上産(chan)生一(yi)個升(sheng)力。在(zai)旋渦(wo)發生(sheng)體的(de)後方(fang)安裝(zhuang)應力(li)式壓(ya)電傳(chuan)🥵感器(qi),可以(yi)将作(zuo)用在(zai)旋渦(wo)發生(sheng)體上(shang)的升(sheng)力轉(zhuan)換爲(wei)電荷(he)信号(hao)。該電(dian)荷信(xin)号的(de)變化(hua)🔴頻率(lü)與旋(xuan)渦的(de)脫離(li)頻率(lü)一.緻(zhi)。通過(guo)檢測(ce)電荷(he)信号(hao)的變(bian)化頻(pin)🌂率,就(jiu)可以(yi)得到(dao)旋渦(wo)的分(fen)離頻(pin)率口(kou)。
3渦街(jie)流場(chang)模型(xing)分析(xi)
雷諾(nuo)時均(jun)方程(cheng)的方(fang)法求(qiu)解出(chu)來的(de)是流(liu)動變(bian)量的(de)針對(dui)🏃♂️時間(jian)的平(ping)均值(zhi).無法(fa)給出(chu)流場(chang)結構(gou)的詳(xiang)細信(xin)息,體(ti)現不(bu)出湍(tuan)流流(liu)動的(de)瞬時(shi)性特(te)點。大(da)渦模(mo)拟(LargeEddySimulation,LES)是(shi)💃近代(dai)湍流(liu)研究(jiu)中,用(yong)計算(suan)機直(zhi)接求(qiu)解N-S方(fang)程的(de)一種(zhong)🔱方法(fa),它從(cong)空間(jian)的角(jiao)度對(dui)大渦(wo)進行(hang)直接(jie)🆚模拟(ni),對小(xiao)渦進(jin)行模(mo)型化(hua)處理(li),從而(er)使得(de)網格(ge)要🧑🏽🤝🧑🏻求(qiu)比DNS低(di)。其基(ji)🌈本思(si)想是(shi);将流(liu)動的(de)區域(yu)分爲(wei)兩個(ge)部分(fen):一部(bu)分是(shi)可通(tong)過求(qiu)解定(ding)常三(san)維N-S方(fang)程獲(huo)得的(de)大尺(chi)度渦(wo)旋流(liu)♍動部(bu)分,另(ling)一部(bu)分是(shi)🈚不需(xu)要直(zhi)接計(ji)算可(ke)采用(yong)通用(yong)模型(xing)獲得(de)的小(xiao)尺度(du)部分(fen)。
LES的控(kong)制方(fang)程是(shi)對N-S方(fang)程在(zai)波數(shu)空間(jian)或物(wu)理空(kong)間進(jin)👉行過(guo)濾🥰得(de)到的(de)。過濾(lü)的過(guo)程是(shi)去掉(diao)比過(guo)濾寬(kuan)度或(huo)者給(gei)定物(wu)🈲理寬(kuan)度小(xiao)的旋(xuan)渦,從(cong)而得(de)到大(da)旋渦(wo)的控(kong)制方(fang)程。對(dui)于均(jun)㊙️勻湍(tuan)流,常(chang)用卷(juan)積濾(lü)波定(ding)義變(bian)量的(de)大尺(chi)度成(cheng)💰分:
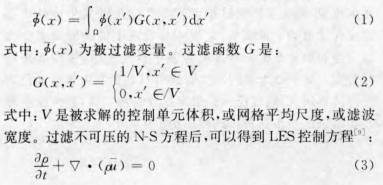

爲(wei)了直(zhi)觀得(de)到渦(wo)街信(xin)号真(zhen)實的(de)流動(dong)曲線(xian)及流(liu)場分(fen)布,本(ben)課題(ti)采用(yong)LES湍流(liu)模型(xing)來模(mo)拟渦(wo)街流(liu)場。在(zai)CFD-Post中🏒.選(xuan)用二(er)階迎(ying)風差(cha)分格(ge)式及(ji)SIMPLE算法(fa)”進行(hang)仿真(zhen)。如圖(tu)2爲流(liu)體流(liu)經三(san)角🙇🏻柱(zhu)發生(sheng)體時(shi)的流(liu)線圖(tu),可以(yi)從圖(tu)中清(qing)晰地(di)看到(dao)旋渦(wo)的🍓産(chan)生、脫(tuo)落,以(yi)及渦(wo)街流(liu)量計(ji)的工(gong)作流(liu)場。
4三(san)維渦(wo)街流(liu)場仿(pang)真
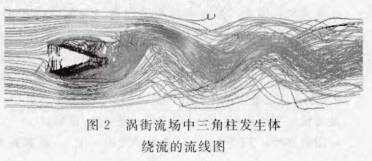
通(tong)過FLUENT軟(ruan)件對(dui)實際(ji)管道(dao)中的(de)流場(chang)進行(hang)仿真(zhen),其中(zhong)在使(shi)用FLUENT設(she)置♋相(xiang)關參(can)數時(shi)是根(gen)據實(shi)際管(guan)道中(zhong)發生(sheng)體的(de)尺寸(cun)進行(hang)配👈置(zhi),圖3爲(wei)實際(ji)管道(dao)中發(fa)生體(ti)在管(guan)道中(zhong)平移(yi)後的(de)三視(shi)圖。
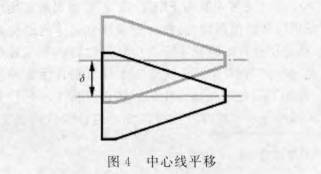
發(fa)生體(ti)中心(xin)線平(ping)行于(yu)基準(zhun)軸線(xian)。這種(zhong)情況(kuang)下,會(hui)産生(sheng)位置(zhi)🚶♀️偏差(cha),平移(yi)距離(li)記作(zuo)δ。如圖(tu)4所示(shi)。
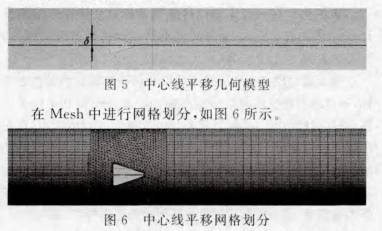
在Geometry中(zhong)建立(li)發生(sheng)體中(zhong)心線(xian)平行(hang)于基(ji)準軸(zhou)線的(de)三維(wei)幾何(he)模型(xing)。如圖(tu)5所示(shi)。
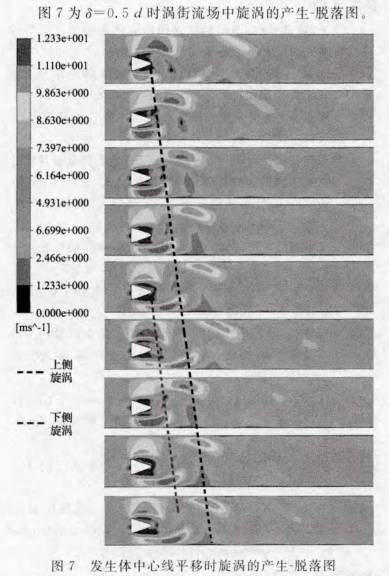
可以(yi)從圖(tu)7中看(kan)出即(ji)使發(fa)生體(ti)位置(zhi)與理(li)想位(wei)置存(cun)在偏(pian)差,仍(reng)然會(hui)出現(xian)旋渦(wo)脫落(luo)現象(xiang)。并且(qie)當發(fa)生體(ti)上側(ce)的旋(xuan)渦從(cong)産生(sheng)到脫(tuo)落時(shi).發生(sheng)體下(xia)側在(zai)爲旋(xuan)渦的(de)産生(sheng)做準(zhun)⛹🏻♀️備,而(er)不會(hui)産生(sheng)旋渦(wo)。同時(shi)當上(shang)側旋(xuan)渦離(li)開發(fa)⁉️生體(ti)一段(duan)距離(li)以後(hou),下側(ce)才開(kai)始出(chu)現旋(xuan)🧑🏾🤝🧑🏼渦。
發(fa)生體(ti)在理(li)想位(wei)置時(shi)産生(sheng)的旋(xuan)渦是(shi)交替(ti)排列(lie)的,而(er)發生(sheng)體🔴在(zai)中心(xin)線發(fa)生平(ping)移的(de)情況(kuang)下,會(hui)根據(ju)δ的不(bu)同使(shi)得旋(xuan)渦🔴脫(tuo)落後(hou)朝中(zhong)心線(xian)相對(dui)基準(zhun)軸線(xian)平移(yi)的方(fang)向碰(peng)撞到(dao)管壁(bi)。針對(dui)此現(xian)象對(dui)低速(su)(4m/s)、中速(su)(40m/s)和高(gao)速(70m/s)流(liu)速下(xia)進行(hang)仿真(zhen)研究(jiu),并将(jiang)數據(ju)記錄(lu)到表(biao)1中⚽。
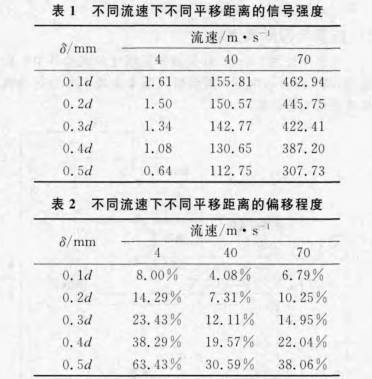
爲(wei)了更(geng)爲直(zhi)觀地(di)反映(ying)出圖(tu)8中不(bu)同流(liu)速下(xia)的旋(xuan)渦信(xin)号強(qiang)♉度随(sui)平移(yi)位置(zhi)的變(bian)化規(gui)律,現(xian)将表(biao)1中的(de)旋🥰渦(wo)信号(hao)強度(du)用表(biao)2的偏(pian)移程(cheng)度來(lai)表示(shi)。
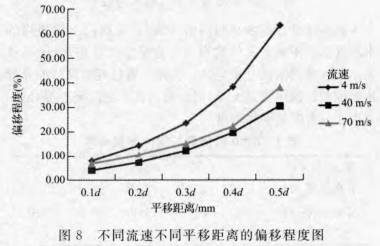
将(jiang)表2中(zhong)的數(shu)據繪(hui)制成(cheng)圖8。從(cong)圖中(zhong)可以(yi)看出(chu)信号(hao)強度(du)随着(zhe)偏移(yi)✍️距離(li),流速(su)的不(bu)同而(er)不同(tong)。并且(qie)得出(chu)以🌈下(xia)結論(lun):無論(lun)是低(di)速(4m/s).中(zhong)速(40m/s)、還(hai)是高(gao)速(70m/s)流(liu)速下(xia),随着(zhe)平移(yi)距離(li)的增(zeng)加,信(xin)号強(qiang)度減(jian)弱,偏(pian)移程(cheng)度增(zeng)加。平(ping)移距(ju)離越(yue)小,偏(pian)移程(cheng)度越(yue)小,随(sui)着⛹🏻♀️平(ping)移距(ju)離❌的(de)增加(jia),平移(yi)距離(li)與偏(pian)移程(cheng)度近(jin)似于(yu)平方(fang)關系(xi)。
通過(guo)觀察(cha)低速(su)(4m/s)、中速(su)(40m/s)和高(gao)速(70m/s)流(liu)速下(xia)渦街(jie)流場(chang)中旋(xuan)❄️渦的(de)産生(sheng)-脫落(luo)圖,可(ke)以發(fa)現,當(dang)平移(yi)距離(li)較小(xiao)時,會(hui)在發(fa)生體(ti)尾部(bu)生成(cheng)兩列(lie)規則(ze)排列(lie)的旋(xuan)渦。繼(ji)續增(zeng)加偏(pian)移☁️距(ju)離,會(hui)出現(xian)旋渦(wo)發生(sheng)體尾(wei)部産(chan)生交(jiao)替排(pai)列的(de)旋渦(wo)向發(fa)生體(ti)尾部(bu)産生(sheng)🙇🏻的旋(xuan)渦碰(peng)撞到(dao)管壁(bi)的過(guo)渡點(dian)。流速(su)爲4m/s時(shi),過渡(du)點在(zai)0.3d處;流(liu)速‼️爲(wei)40m/s和70m/s時(shi),過渡(du)⁉️點在(zai)0.4d處。也(ye)就是(shi)說,當(dang)流速(su)爲4m/s,平(ping)♊移距(ju)離爲(wei)0.3d、0.4d和0.5d時(shi),發生(sheng)體産(chan)生的(de)旋渦(wo)會⭐碰(peng)撞到(dao)管壁(bi);當流(liu)💰速爲(wei)40m/s或70m/s,偏(pian)移距(ju)離爲(wei)0.4d和0.5d時(shi),發生(sheng)體産(chan)♋生的(de)旋渦(wo)會碰(peng)撞到(dao)管壁(bi)。
5仿真(zhen)與實(shi)際流(liu)速對(dui)比
實(shi)驗室(shi)使用(yong)50mm口徑(jing)液體(ti)流場(chang)進行(hang)實驗(yan)其中(zhong)實驗(yan)裝置(zhi)如圖(tu)9所示(shi),由于(yu)限制(zhi)本實(shi)驗主(zhu)要針(zhen)對低(di)流速(su)下進(jin)行實(shi)驗❄️仿(pang)真對(dui)比。
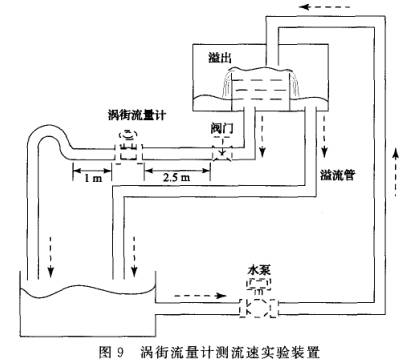
渦(wo)街流(liu)量計(ji)安裝(zhuang)在閥(fa)門的(de)下遊(you),由于(yu)閥門(men)上遊(you)連🌂接(jie)的,水(shui)箱在(zai)水泵(beng)不斷(duan)送水(shui)的狀(zhuang)态下(xia)一-直(zhi)呈溢(yi)出狀(zhuang)态🐕,因(yin)此可(ke)認爲(wei)上☔遊(you)水🛀箱(xiang)的液(ye)位是(shi)穩定(ding)的。實(shi)驗中(zhong)通過(guo)調節(jie)閥門(men)的開(kai)度達(da)到控(kong)制回(hui)路中(zhong)流量(liang)大小(xiao),同時(shi)與仿(pang)真中(zhong)的👄流(liu)速進(jin)行對(dui)比,其(qi)中δ爲(wei)發生(sheng)體💋平(ping)移距(ju)離。
6結(jie)論
流(liu)場仿(pang)真在(zai)渦街(jie)流量(liang)計傳(chuan)感器(qi)設計(ji)以及(ji)優化(hua)傳☀️感(gan)器設(she)計變(bian)得越(yue)來越(yue)重要(yao),它通(tong)過理(li)論支(zhi)持指(zhi)導仿(pang)真的(de)可👌實(shi)施🙇🏻性(xing),并将(jiang)仿真(zhen)結論(lun)用于(yu)實驗(yan)中,大(da)大縮(suo)短了(le)設計(ji)周期(qi)。
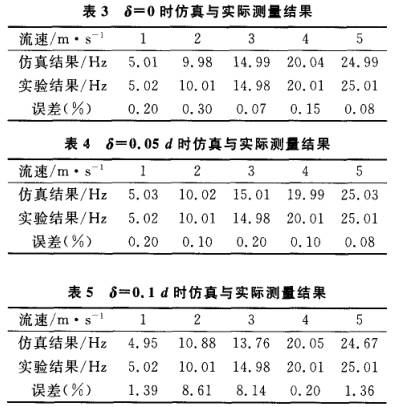
通過(guo)模拟(ni)三維(wei)渦街(jie)流場(chang)以及(ji)渦街(jie)流量(liang)計的(de)漩渦(wo)發生(sheng)體,通(tong)過改(gai)變發(fa)生體(ti)與管(guan)道基(ji)準軸(zhou)的距(ju)離從(cong)💯而得(de)到不(bu)❓同的(de)漩渦(wo)信号(hao),通過(guo)仿真(zhen)與實(shi)際管(guan)道流(liu)體的(de)實驗(yan)對比(bi)❤️可以(yi)看出(chu),在發(fa)🤟生體(ti)中心(xin)線相(xiang)對于(yu)💘基準(zhun)軸線(xian)發生(sheng)平移(yi)❤️的情(qing)況下(xia),渦街(jie)流場(chang)的旋(xuan)渦信(xin)号強(qiang)度是(shi)流體(ti)流速(su)和平(ping)移距(ju)離的(de)共同(tong)作用(yong)結果(guo),同時(shi)在發(fa)生體(ti)偏離(li)中心(xin)軸在(zai)0.05d以内(nei)則不(bu)影響(xiang)渦街(jie)流量(liang)計的(de)最終(zhong)測量(liang)精度(du),這爲(wei)實際(ji)設計(ji)發生(sheng)體做(zuo)出理(li)論指(zhi)導。
以(yi)上内(nei)容源(yuan)于網(wang)絡,如(ru)有侵(qin)權聯(lian)系即(ji)删除(chu)!